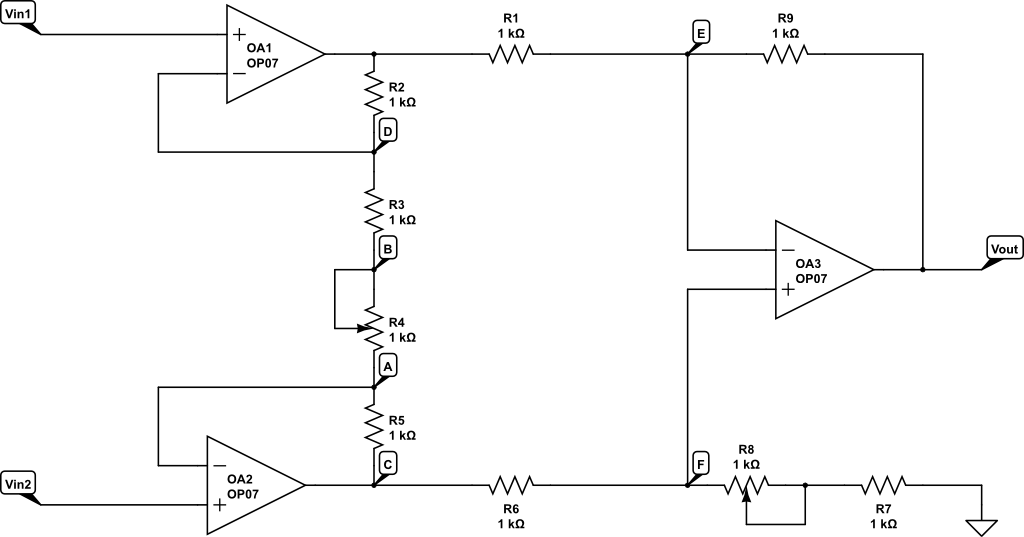
Esta disposición de AI se puede separar en dos etapas:
Etapa 1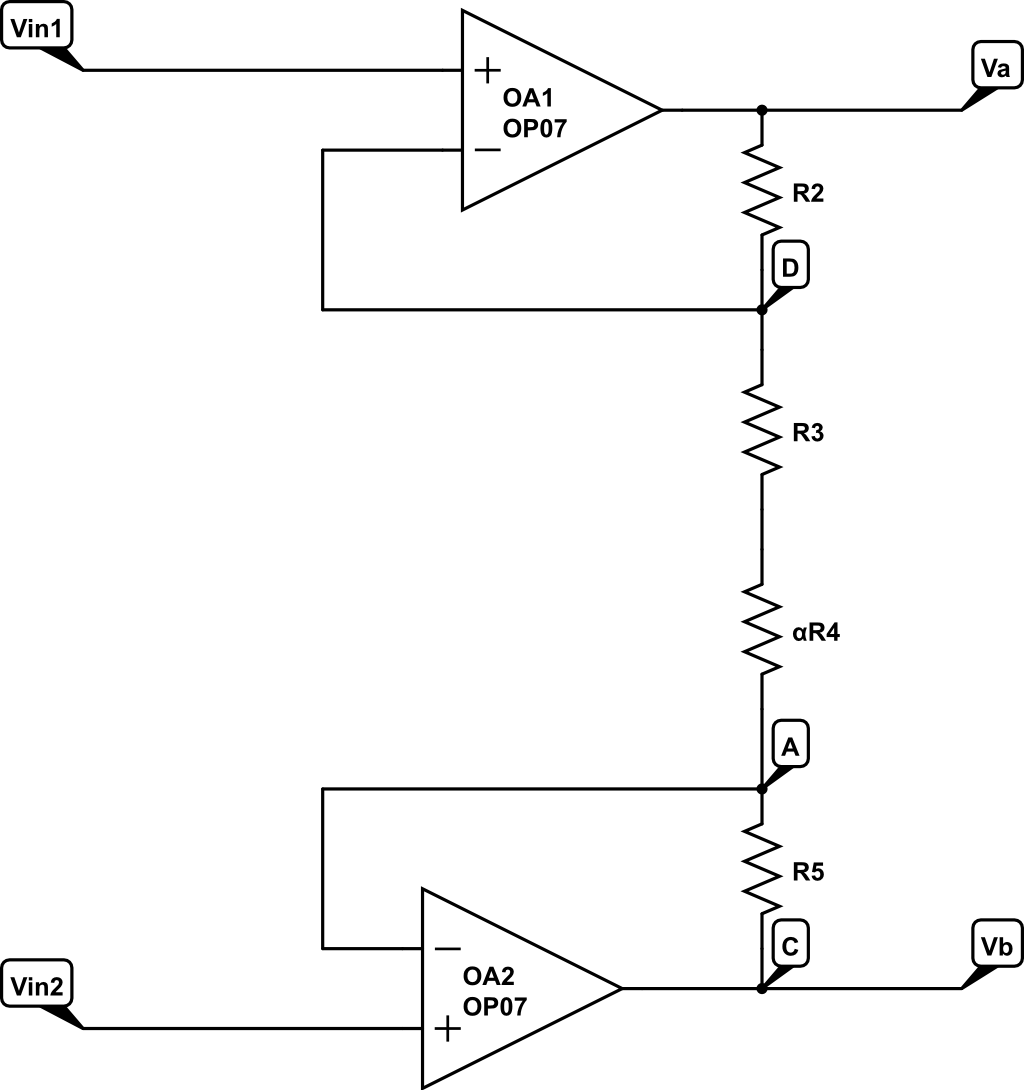 Por superposición y haciendo el KCL:
Por superposición y haciendo el KCL:
\(\)
\[ V_{in_1} = 0 \]
\[R_3 + \alpha R_4 = R_G\]
\[ \frac{V_{in_2}-V_B}{R_5} = \frac{0-V_{in_2}}{R_G}\]
\[V_{in_2}R_G -V_B R_G =-V_{in_2}R_5\]
\[V_B = \left( 1 + \frac{R_5}{R_G} \right) V_{in_2}\]
\[\frac{0 – V_{in_2}}{R_G} + \frac{0 – V_A}{R_2} = 0\]
\[V_A = – \frac{R_2}{R_G}V_{in_2}\]
Ahora con \(V_{in_2} = 0\),
\[\frac{V_{in_1}-0}{R_G} = \frac{0-V_B}{R_5} \]
\[V_{in_1}R_5 =-V_B R_G\]
\[V_B =-\frac{R_5}{R_G}V_{in_1}\]
\[\frac{0 – V_{in_2}}{R_G} + \frac{0 – V_A}{R_2} = 0 \]
\[V_A = \left( 1 + \frac{R_2}{R_G} \right) V_{in_1} \]
Por lo que finalmente, tenemos que:
\[V_A = \left( 1 + \frac{R_2}{R_G} \right) V_{in_1} – \frac{R_2}{R_G}V_{in_2} \]
\[V_B = \left( 1 + \frac{R_5}{R_G} \right) V_{in_2} -\frac{R_5}{R_G}V_{in_1} \]
En cuanto a la ganancia en modo común de esta etapa, la podemos calcular haciendo \(V_{in_1} = V_{in_2}\). De esta manera,
\[V_A = \left( 1 + \frac{R_2}{R_G} \right) V_{in_1} – \frac{R_2}{R_G} V_{in_1} = V_{in_1}\]
\[V_B = \left( 1 + \frac{R_5}{R_G} \right) V_{in_1} -\frac{R_5}{R_G}V_{in_1} = V_{in_1}\]
Por tanto, sea cual sea el valor de \(R_2\), \(R_5\) y \(R_G\), la tensión en modo común pasa a los nodos \(V_A\) y \(V_B\).
La otra etapa restante es:
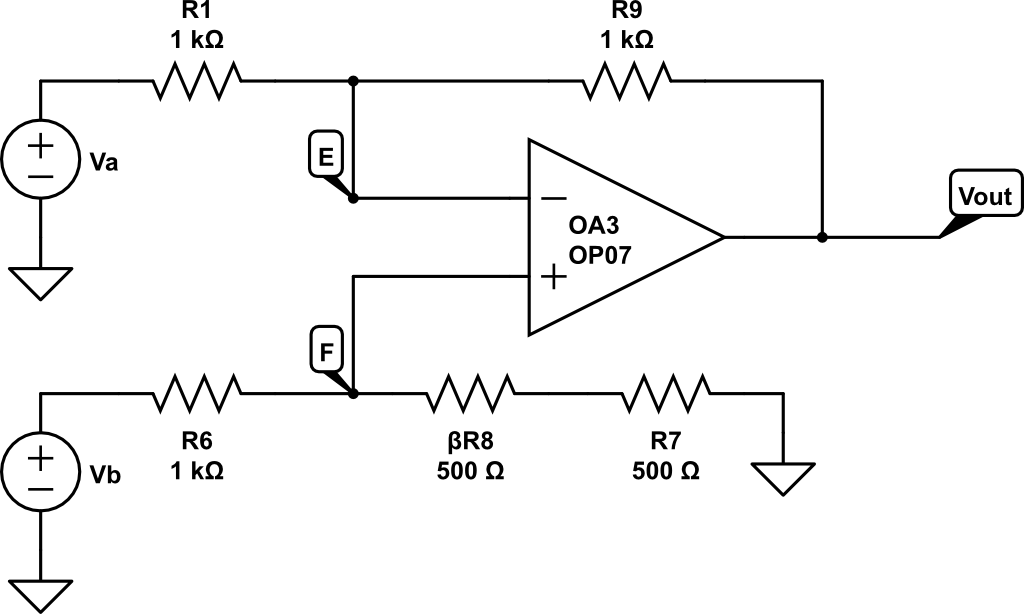 De nuevo, aplicando superposición podemos llegar a la expresión final de la salida.
De nuevo, aplicando superposición podemos llegar a la expresión final de la salida.
\[V_{out} = – \frac{R_9}{R_1} V_A + \left(1 + \frac{R_9}{R_1} \right) \frac{\beta R_8 + R_7 }{ \beta R_8 + R_7 + R_6} V_B \]
\[V_{out} = – \frac{R_9}{R_1} \left[ \left( 1 + \frac{R_2}{R_G } \right) V_{in_1} – \frac{R_2}{R_G }V_{in_2} \right]+ \left(1 + \frac{R_9}{R_1} \right) \frac{\beta R_8 + R_7 }{ \beta R_8 + R_7 + R_6} \left[ \left( 1 + \frac{R_5}{R_G} \right) V_{in_2} -\frac{R_5}{R_G}V_{in_1} \right] \]
Para calcular la ganancia en modo común de esta etapa vamos a aplicar una tensión igual en las dos entradas diferenciales. Por tanto \(V_A = V_B = V_{CM}\). Así conseguimos la siguiente expresión para la tensión de salida.
\[V_{out} = – \frac{R_9}{R_1} V_{CM} + \left(1 + \frac{R_9}{R_1} \right) \frac{\beta R_8 + R_7 }{ \beta R_8 + R_7 + R_6} V_{CM} \]
También identificaremos \(R_{ref} = \beta R_8 + R_7\) para facilitar las operaciones.
\[V_{out} = – \frac{R_9}{R_1} V_{CM} + \left(1 + \frac{R_9}{R_1} \right) \frac{R_{ref}}{R_{ref}+ R_6} V_{CM} \]
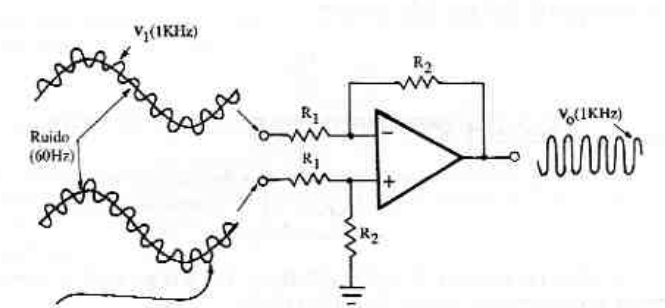
Idealmente, querríamos que esta tensión fuese igual a 0, de manera que el amplificador de instrumentación pudiese rechazar completamente para poder, por ejemplo, eliminar el ruido acoplado en ambas entradas tal y como puede verse en la figura.
\[V_{out} = – \frac{R_9}{R_1} V_{CM} + \left(1 + \frac{R_9}{R_1} \right) \frac{R_{ref}}{R_{ref}+ R_6} V_{CM} \]
\[G_{cm} = \frac{V_{out}}{V_{CM} } = – \frac{R_9}{R_1} + \left(1 + \frac{R_9}{R_1} \right) \frac{R_{ref}}{R_{ref}+ R_6} \]
\[G_{cm} = \frac{R_{ref}}{R_{ref}+R_6} – \frac{R_9 R_6}{R_1 R_{ref} + R_1 R_6} \]
Por tanto, resolviendo la ecuación de ganancia en modo común igual a 0, \(G_{cm} = 0\), tenemos que
\[- \frac{R_9}{R_1} + \left(1 + \frac{R_9}{R_1} \right) \frac{R_{ref}}{R_{ref}+ R_6} = 0\]
Ecuación que podemos identificar de la siguiente manera:
\[A = \frac{R_9}{R_1}\]
\[ B =\frac{R_{ref}}{R_{ref}+ R_6}\]
\[ – A + \left(1 + A \right) B = 0 \]
\[-A + B + AB = 0 \]
\[\left( B -1 \right) A = -B \]
\[ A = \frac{-B}{B-1} = \frac{B}{1-B} \]
\[A = \frac{\frac{R_{ref}}{R_{ref}+ R_6}}{1-\frac{R_{ref}}{R_{ref}+ R_6}} = \frac{R_{ref}}{R_6} \]
\[\frac{R_9}{R_1} = \frac{R_{ref}}{R_6} \]
Por tanto, para tener una ganacia en modo común de 0 (o lo que es lo mismo un CMRR\( = \infty\)), \(R_9 = R_{ref}\) y \(R_{1} = R_6\)
Por otra parte, si queremos que \(V_A = V_B\) cuando \(V_{in_1} = V_{in_2}\), necesitamos que se cumpla la siguiente relación entre las resistencias \(R_2\) y \(R_5\).
\[ V_A = V_B \left( 1 + \frac{R_2}{R_G} \right) V_{in_1} – \frac{R_2}{R_G}V_{in_2} = \left( 1 + \frac{R_5}{R_G} \right) V_{in_2} -\frac{R_5}{R_G}V_{in_1} \left( 1 + \frac{R_2}{R_G} \right) – \frac{R_2}{R_G} = \left( 1 + \frac{R_5}{R_G} \right) -\frac{R_5}{R_G} \]
Por simple inspección se llega a la conclusión de que \(R_2 = R_5\).
Por último, podemos calcular la ganancia diferencial y la ganancia de modo común de otro modo. Si definimos la tensión diferencial como \(V_d = V_{in_1}- V_{in_2}\) y la tensión en modo común como \(V_c = \frac{V_{in_1} + V_{in_2}}{2}\), sustituimos en la expresión de \(V_o\) e identificamos la expresión resultante como \(V_o = G_d V_d + G_c V_c\), en la que \(G_d\) es la ganancia diferencial y \(G_c\) es la ganancia en modo común (la misma que hemos calculado arriba, obtenemos que \(G_d\) es igual a:
\[ G_d = \frac{-2 R_9 R_G R_{ref} – R_9 R_G R_6 – 2 R_9 R_2 R_{ref} -2 R_9 R_2 R_6 – R_{ref}R_1 R_G – 2 R_1 R_5 R_{ref} – 2 R_9 R_{ref} R_5}{2R_1 R_G \left( R_{ref} + R_6 \right) } \]
En caso de tener las resistencias balanceadas, la expresión de la ganancia diferencial se simplifica a:
\[G_d = -\frac{R_G^2}{R_1 \left( R_9 + R_1 \right)} – \frac{R_9}{2 \left( R_9 + R_1\right)} – \frac{R_9 R_2}{R_G \left( R_9 + R_1 \right)} – \frac{R_9}{2 \left( R_9+ R_1 \right)} – \frac{R_2 R_9}{R_G \left( R_9+ R_1 \right)} – \\ \frac{R_9^2 R_2}{R_1 R_G \left( R_9 + R_1 \right)} \]
Conclusiones
Este amplificador de instrumentación es muy utilizado para amplificar salidas de sensores y demás aplicaciones de instrumentación. Sus ventajas residen en que si está balanceado se puede conseguir tener una ganancia de modo común baja (o CMRR alto) a la vez que se mantiene una ganancia ajustable a través de \(R_G = R_3 + \alpha R_4\). Por último, también podemos ver como la impedancia de entrada de este amplificador es muy alta, ya que ambas entradas son las entradas de un AO.
\[V_{out} = – \frac{R_9}{R_1} \left[ \left( 1 + \frac{R_2}{R_G } \right) V_{in_1} – \frac{R_2}{R_G }V_{in_2} \right]+\left(1 + \frac{R_9}{R_1} \right) \frac{R_{ref} }{R_{ref} + R_6} \left[ \left( 1 + \frac{R_5}{R_G} \right) V_{in_2} -\frac{R_5}{R_G}V_{in_1} \right] \]
\[G_d = \frac{-2 R_9 R_G R_{ref} – R_9 R_G R_6 – 2 R_9 R_2 R_{ref} -2 R_9 R_2 R_6 – R_{ref}R_1 R_G – 2 R_1 R_5 R_{ref} – 2 R_9 R_{ref} R_5}{2R_1 R_G \left( R_{ref} + R_6 \right)} \]
\[G_{cm} = \frac{R_{ref}}{R_{ref}+R_6} – \frac{R_9 R_6}{R_1 R_{ref} + R_1 R_6} \]
Enlaces a CircuitLab para simulación