Cualquier cable de menor de 3 metros no está sujeto a la normativa EMI.
La norma define 3 criterios aptitud para los test de inmunidad:
- Criterio A: el dispositivo funciona correctamente antes, durante y después del test. Si alguna función durante el test no se ha degradado pero se especifica en el manual, puede pasar como criterio A.
- Criterio B: tras el test el funcionamiento es el correcto. Durante el test no. Sin embargo, no puede sufrir ninguna pérdida de información almacenada.
- Criterio C: el dispositivo funciona mal tras pasar el test hasta que se reinicia.
En ningún caso de los anteriores, hay un daño físico del producto tras el test. Para el caso de RF radiada o conducida (e.g., acoplamiento de una señal de radio) de manera continuada, es necesario pasar la prueba con criterio A, ya que de lo contrario el producto no funcionará nunca.
Inmunidad frente a RF conducidas
Esta normativa deben pasarla todas aquellas entradas E/S del producto. Es decir, a entradas de alimentación y comunicación. Estas son sometidas a una tensión de modo común con una modulación AM de 1 kHz al 80% en el caso de un producto de tecnologías de la información.
Si los cables son apantallados, se inyecta una señal de perturbación sobre la pantalla para simular campos captados mediante una resistencia de 100 \(\Omega\). Si no están apantallados, se aplica en modo común sobre la línea con una impedancia de \(150 \Omega\).
La RF conducida puede manifestarse como un offset debido que al pasar por una unión PN esta se rectifique y aparece una tensión positiva.
Para proteger un equipo frente RF se puede hacer mediante blidaje, mediante cableado, mediante un diseño adecuado de la PCB (teniendo en cuenta el stack-up y el rutado de pistas) y también mediante filtrado con un filtro LC (entre otros).
La inductancia de una pista en la PCB es de 7-9 nH/cm.
ESD
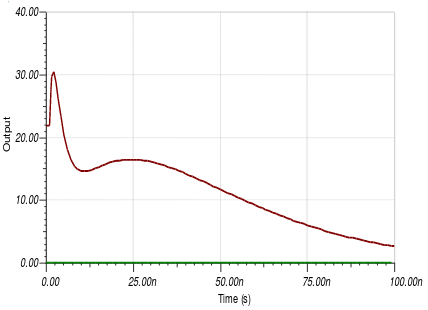
La pistola ESD está formada por un alimentador de alta tensión y un condensador en paralelo.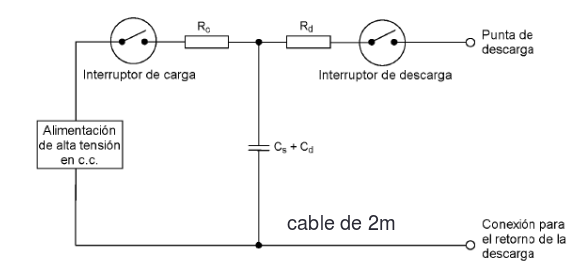 Esto hace que al realizar una descarga, la forma de onda de la corriente sea la superposición de dos descargas. Una directa de la alimentación de alta tensión a la punta y otra más tardía que corresponde a la descarga del condensador.
Esto hace que al realizar una descarga, la forma de onda de la corriente sea la superposición de dos descargas. Una directa de la alimentación de alta tensión a la punta y otra más tardía que corresponde a la descarga del condensador.
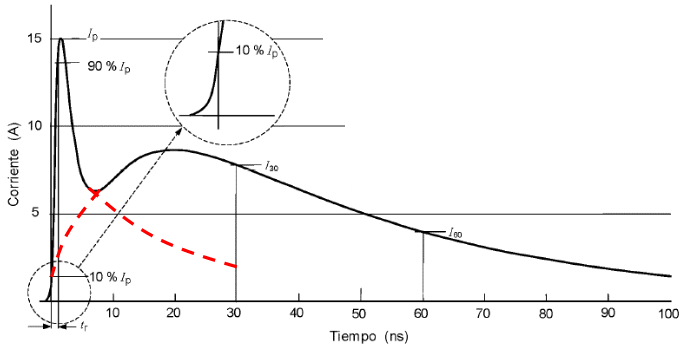
| Nivel | Tensión indicada (kV) | Primera cresta de la corriente de descarga (± 15%) | Tiempo de subida \(t_r\) (± 25%) | Corriente (± 30%) a 30 ns | Corriente (± 30%) a 60 ns |
| 1 | 2 | 7.5 | 0.8 | 4 | 2 |
| 2 | 4 | 15 | 0.8 | 8 | 4 |
| 3 | 6 | 22.5 | 0.8 | 12 | 6 |
| 4 | 8 | 30 | 0.8 | 16 | 8 |
Para pasar los test ESD el DUT (Design Under Test) debe funcionar en su modo más sensible. Se escogen puntos de test y se determina si la descarga es por aire o por contacto. Luego se aplican más de 10 descargas simples de la polaridad más sensible en los puntos seleccionados y se espara al menos 1 segundo para determinar si ha habido fallo. Los contactos de un conector plástico (como el de Ethernet) solo reciben descargas en el aire. Si el equipo no está conectado a tierra, se descargará el DUT entre disparo y disparo.
Las ESD llegar por conducción o por acoplamiento capacitivo o inductivo.
Tras el test, el equipo debe funcionar con criterio de aptitud B, es decir, debe funcionar correctamente al finalizar el test.
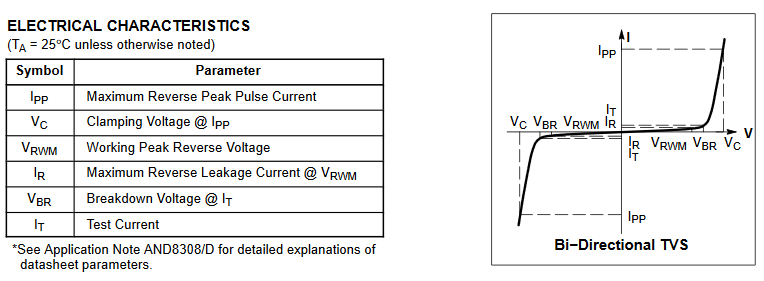
Diodos TVS: zener con unión PN gruesa para que puede aceptar corrientes grandes. Utilizado en el 90% de los casos.
Varistores: no aptos para lineas rápidas.
Se prefiere realizar descargar con una pistola ESD por contacto ya que la se asegura la repetibilidad del disparo. A través del aire, el camino de descarga nunca es el mismo.
Además de descargas directas (tocando directamente la caja), también se realizan descargas indirectas. Para ello, se descarga sobre un plano capacitivo cercano al producto. Estas descargas pueden ser más dañinas que las de contacto directo ya que la pistola tiene una impedancia de salida similar a la de un dedo humano (~330 Ω) mientras que por descarga indirecta la impedancia del aire será menor y el pico de corriente puede ser mucho mayor.
Teniendo en cuenta el campo eléctrico de ruptura, una distancia que minimizara las descargas ESD sobre la PCB es de 8 mm entre cualquier junta y la PCB. Si hubiese pintura conductora en el interior, la descarga se repartiría por toda la superficie. Sin embargo, habría que considerar la ESD desde cualquier punto de la pintura y la PCB. También se puede añadir un pantalla metálica para capturar la energía de la ESD. Esto podría hacer que una descarga cargase la placa metálica y que posteriormente hubiese una segunda ESD entre la placa y la PCB a través del aire. Para evitar esto, hay que poner la PCB al mismo potencia, de manera que se tendría que conectar la pantalla con la PCB. Esto lo que consigue es que parte de la energía de la descarga se vaya se almacene directamente en la placa y no en la PCB, minimizando el posible riesgo para los componentes.
Las protecciones que suelen utilizarse para ESD son utilizando diodos TVS tal y como hemos dicho. Los circuitos integrados llevan una protección en cada pin para evitar ESD. Sin embargo, la máxima corriente que suelen soportar es ~150 mA. Esto hace que sea totalmente inútil confiar en la propia protección del IC. La corriente de pico suele ser de varias decenas de amperios y una tensión de 8 kV.
Las descargas ESD llegan a mi equipo por conducción o por acoplamiento capacitivo o inductivo a través de las líneas de E/S del equipo.
La primera línea de protección del equipo es la caja, que debería ser de plástico para evitar la entrada de ESD al circuito. Para evitar descargas ESD entre cualquier junta de la caja y la PCB hay que dejar un espacio libre de 8 mm.
También se puede recubrir el interior de la caja con una placa metálica o pintura conductora, ya que puede capturar la descarga y alejarla de la electrónica. La masa del circuito, las protecciones ESD, las pantallas de los cables y los conectores deberán ir conectados a la placa, para asegurar el mismo potencial y evitar descargas entre la placa y la PCB.
En cada de no disponer de una placa metálica en el interior de la placa, podemos utilizar un área de masa de E/S separada de la masa del circuito. Si no hay masa de circuito, habría que conectarlo a la masa del circuito pero es la peor solución.
Si la caja exterior es metálica, puede facilitar la descarga a tierra pero durante la descarga ESD la caja alcanzará varios kV que podrían descargarse de nuevo a través del aire y también, podrían inyectarse corrientes en los nodos del circuito debido a capacidades parásitas (a las altas frecuencias del ESD la capacidad parásita puede significar a un camino de baja impedancia).
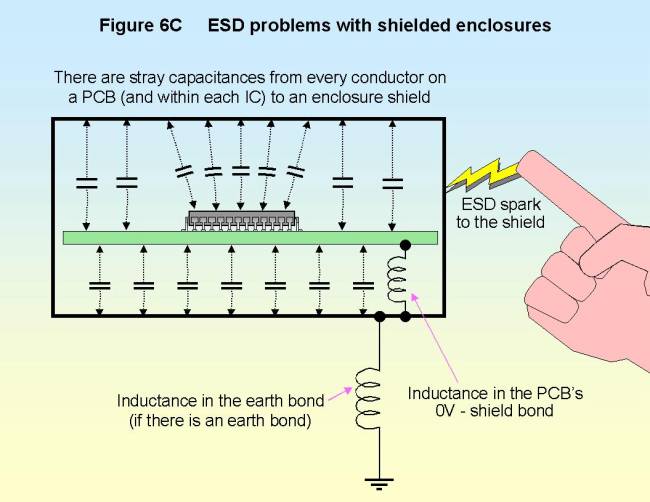
Para solucionar el primer problema, habría que conectar la caja a la masa del circuito de manera directa o capacitivamente o dejar suficiente espacio entre la caja y la PCB para evitar descargas secundarias. Para solucionar la inyección de corrientes, habría que conectar la caja y el PCB en varios puntos o añadir una segunda caja. De esta manera, habría menos puntos cuya diferencia de potencial hiciese circular esta corriente indeseada.
Sin embargo, la caja no es suficiente para evitar descargas ESD y serán necesarios elementos de protección insertados en nuestro diseño.
Diodos TVS
Los diodos TVS (transient voltage suppressor), son diodos zener con una unión PN más gruesa para soportar corrientes instantáneas grandes. Sin embargo, al tener una unión PN más gruesa también tienen una capacidad mayor que carga al circuito.
Suelen ponerse en las pistas de E/S derivando a masa.
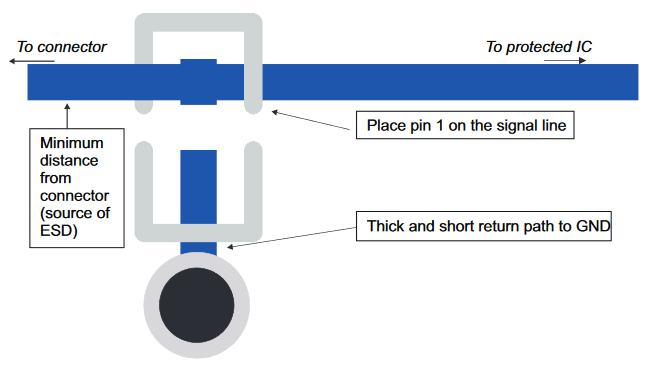
Si ponemos el TVS alejado de la pista que estamos protegiendo 1 cm y teniendo en cuenta que la inductancia de una pista es de 9 nH/cm y la pendiente de la corriente de una descarga ESD es de 20 A/ns, estaría degradando la protección:
\[ V = L \frac{di}{dt} = 9~nH\cdot 20 A/ns = 180 V \]
Cada milímetro de pista entre la pista y el TVS degrada aproximadamente 20 V la protección.
El diodo TVS muchas veces no es suficiente y es necesario añadir una resistencia en serie para limitar el pulso ESD residual. Normalmente es una resistencia, una ferrita o una inductancia (propia de la pista o discreta). El valor de la impedancia en serie debe ser tan alta como lo permita la aplicación. En caso de aplicaciones de alta frecuencia serán inviables.
Modelos SPICE de modelos TVS de LittelFuse
Los conectores con filtros integrados no suelen ser soluciones definitivas ya que suelen tener filtros suaves. Las ferritas que incorporan tienen un flujo de campo magnético de saturación bajo y a partir de entonces dejan pasar toda la interferencia, por lo que para ESD son inútiles.
Como regla de diseño, la entrada de un integrado digital debería soportar como máximo 100 mA. En un integrado analógico, de 2-5 mA.
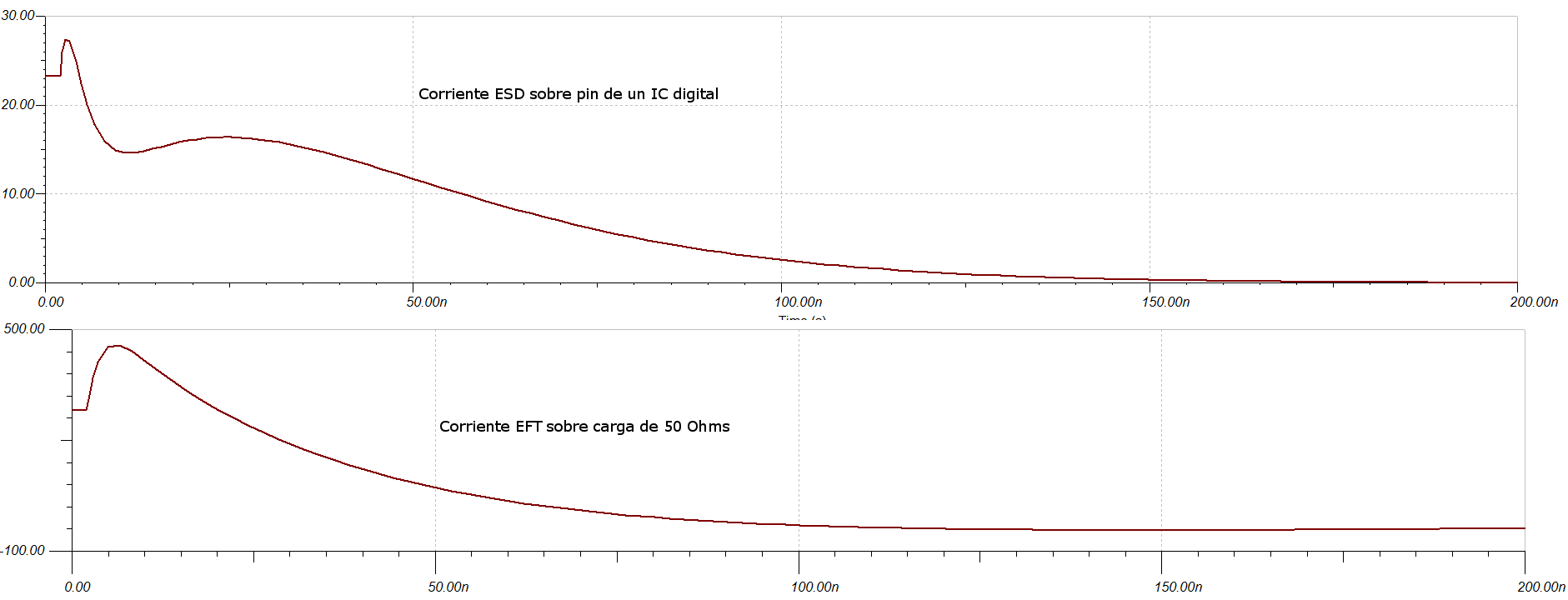
EFT (Electrical Fast Transients)
En la línea de alimentación pueden existir transitorios rápidos que pueden afectar al funcionamiento de un equipo. Los EFT pueden surgir de la conexión del cable de alimentación AC, de la conmutación a ON/OFF de un equipo o cuando un relé se abre o se cierra. Otras fuentes de EFT pueden ser cargas altamente inductivas, como motores.
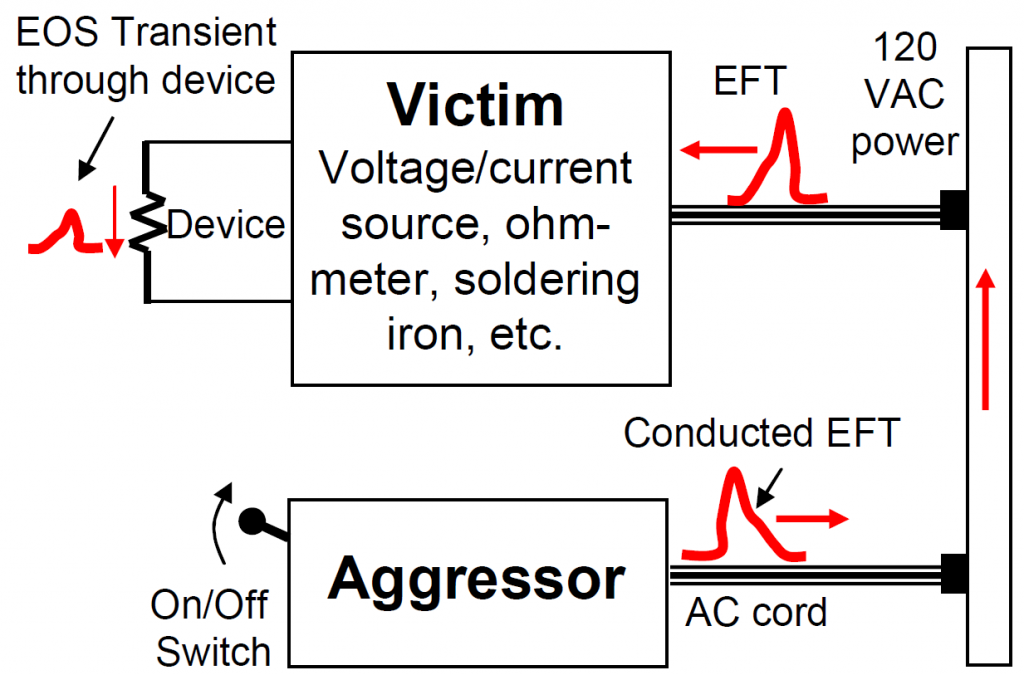
Al igual que las ESD son descargas de gran tensión pero de mayor duración.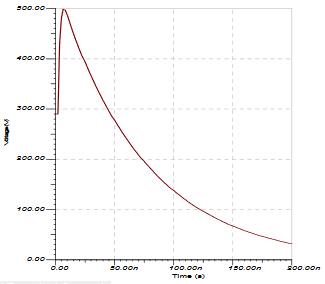
| E/S alimentación y tierra | E/S señal | ||
| Nivel | Tensión de cresta (kV) | Nivel | Tensión de cresta (kV) |
| 1 | 0.5 | 1 | 0.25 |
| 2 | 1 | 2 | 0.5 |
| 3 | 2 | 3 | 1 |
| 4 | 4 | 4 | 2 |
En los test, para introducir la EFT se utiliza una pinza de acoplamiento capacitiva alrededor del cable de alimentación. Este acoplamiento capacitivo se llama clamp y tiene una capacidad de 100 pF.
La EFT puede ser mucho más dañina que la ESD:
Según la norma EN 55024, aplicable a equipos de tecnología de la información:
- Solo se aplica el test a cables de señal >3 m.
- El criterio de aptitud es el B.
Se aplica una ráfaga de pulsos de 75 pulsos que se repiten cada 200 \(\mu s\) (frecuencia 5 kHz).
Ondas de choque
Las ondas de choque son las sobretensiones provocadas por descargas atmosféricas (rayos). La energía del pulso de test puede ser miles de veces mayor que la de ESD y EFT, por lo que los circuitos de protección para estos no sirven.
En tensión, el tiempo de subida de la onda es de 1.2 \(\mu s\) y el tiempo transcurrido hasta que vuelve a tener el valor mitad del pico, pasan 50 \(\mu s\). Es decir, es un pulso 1.2\(\mu s\)/50\(\mu s\).
En corriente es \(8/20\mu s\), cuyo pico viene determinado por la impedancia equivalente del generador (\(\approx 2 \Omega\)).
Como elementos de protección, hay que utilizar diodos TVS de alta potencia, tubos de descarga de gas, o varistores (MOVs) de alta potencia. Hay que tener en cuenta que las compañías eléctricas ya aportan una protección primaria en modo común a la entrada del edificio, pero si se trata de una red externa como la de teléfono esta protección está instalada por el proveedor.
Para proteger frente a ESD, EFT y ondas de choque, el esquema de protección debería constar de 2 niveles:
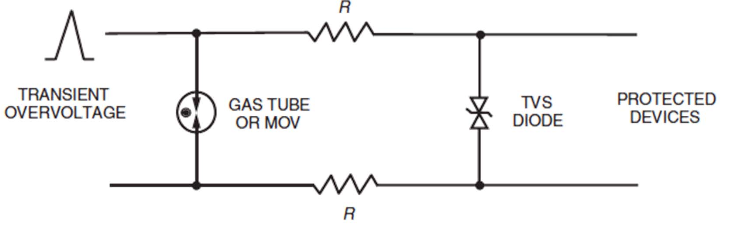
- La interferencia de alta tensión llega al circuito. En este momento, debido a que el diodo TVS tiene una respuesta rápida, es el primero que se pone a conducir y a derivar la señal a tierra.
- Mientras el diodo TVS está derivando corriente a tierra, la resistencia R limita la corriente y hace que caiga tensión.
- El valor de R se debe calcular de manera que el tubo de gas, que tiene un tiempo de respuesta lento pero es capaz de derivar grandes potencias, comience a conducir antes de que se alcance la corriente máxima que puede conducir el diodo TVS.
Diodos TVS de alta potencia
Los diodos TVS de alta potencia tienen una alta capacidad (~ 1 nF) y soportan potencias de kW, aunque hay muchos modelos diferentes. Sin embargo, cuanto más potencia deban soportar su capacidad será mayor ya que la capacidad viene determinada por el tamaño de la unión PN y su zona de deplexión que debe ser mayor para soportar más potencia. Como disipan mucha potencia, su temperatura cambiará drásticamente, por lo que hay que tener en cuenta el derating por temperatura en el que la corriente de pico máxima que puede soportar puede bajar hasta el 0%.
Varistores
tl;dr: puede soportar más tensiones de pico pero deja pasar más interferencias. Ademas, se degrada.
Metal-oxide varistor (MOV) están formados por granos de óxido de zinc y otros metales que forman multitud de diodos dispuestos en todas las direcciones, por lo que es bidireccional y simétrico. Tienen una impedancia alta por debajo de la tensión de ruptura y una impedancia baja por encima de dicha tensión. Sin embargo, estos elementos se degradan tras cada transitorio absorbido.
Tubos de descarga de gas (GDT)
tl;dr: aguantan mucha corriente, limitando a ~10 V. Pero son muy lentos (ms). Cada vez que se ioniza, se deposita metal en las paredes y se crea un ruta de baja impedancia que deteriora su efectividad.
Se usa principalmente para proteger líneas externas (Ethernet, RS-485, …) a la entrada de edificios o instalaciones.
Tienen una baja capacidad (~1 pF), por lo que no cargan las líneas de datos rápidas. Son lentos ya que necesitan ionizar el gas de su interior. Sin embargo, una vez ionizado es capaz de absorber mucha potencia y mantener una tensión fija en sus bornes. Cuando el transitorio termina, el GDT vuelve a su estado de alta impedancia.