Cuando hablamos del comportamiento de un condensador en frecuencia, imaginamos que su impedancia decrece hasta hacerse 0 en el infinito.
Sin embargo, en la realidad nos encontramos que el modelo real de una condensador tiene una resistencia en serie además de un inductor. En esta entrada vamos a ver solo los efectos que tiene dicha resistencia en serie, también conocida como ESR (equivalent series resistor).
Caso ideal
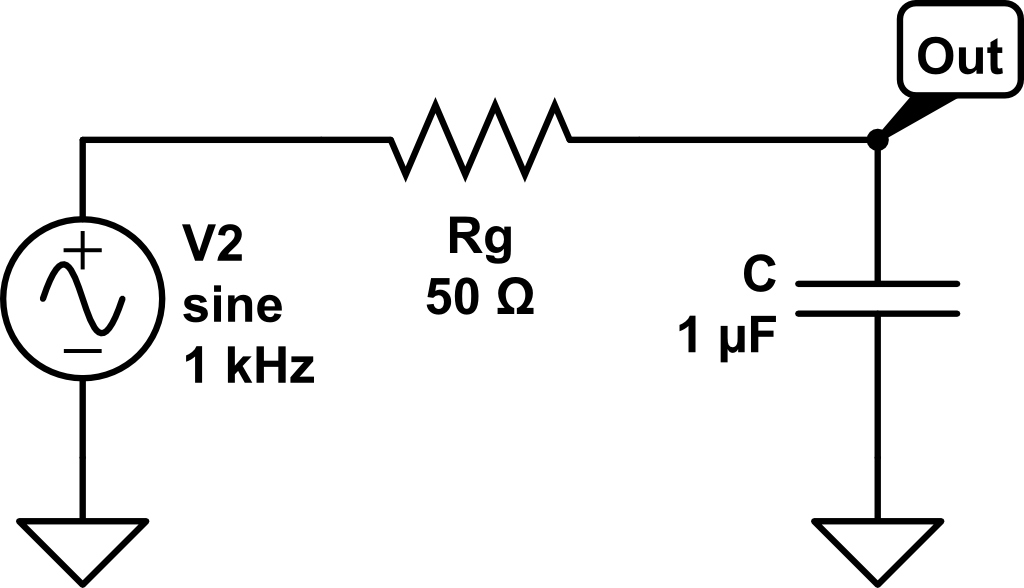
Si calculamos la función de transferencia de este circuito, encontraremos que tiene la siguiente expresión:
\[H(s) = \frac{\frac{1}{CR_g}}{s+\frac{1}{CR_g}}\]
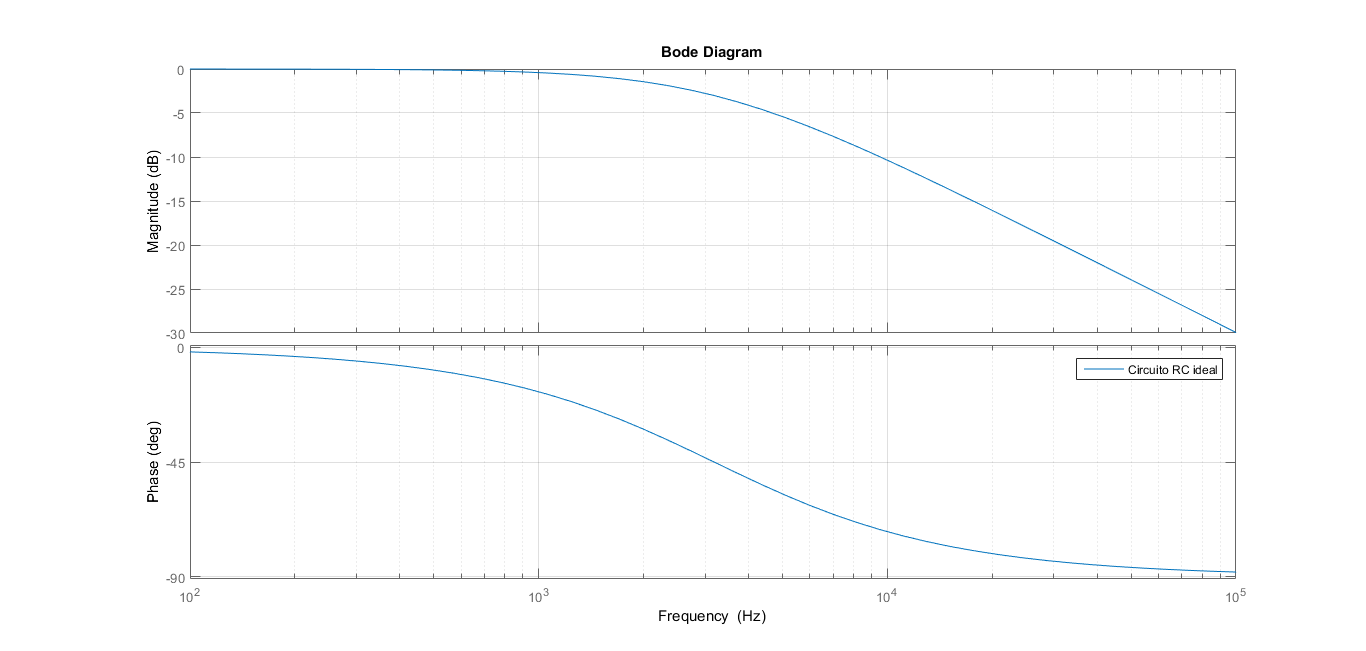
Vemos que la frecuencia de corte a la cual el valor absoluto de la función de transferencia H(s) ha disminuido 3 dB es:
\[f = \frac{1}{2\pi R C} = \frac{1}{2\pi \cdot 50 \cdot 10^{-6}} = 3183 Hz\]
Sin embargo, ¿cómo va a ser su respuesta en frecuencia si añadimos una resistencia en serie?
Caso real
Para tener en cuenta los efectos de la resistencia en serie, modificamos el esquemático original añadiendo la resistencia en serie con el condensador. Para que los efectos sean más notables de manera que se vean mejor las consecuencias que tiene, el valor de la resistencia se ha escogido alto (50 Ω). Sin embargo, los condensadores reales intentan mantener este valor tan bajo como sea posible para seguir manteniendo las características de condensador en un ancho de banda más amplio.
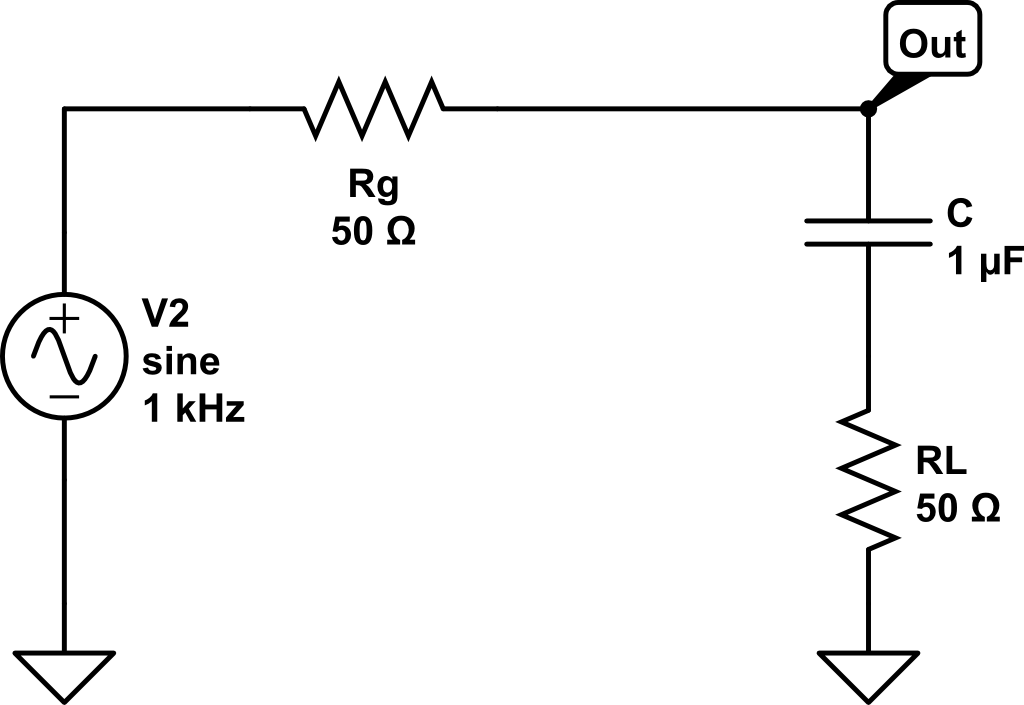
La función de transferencia de este circuito es:
\[H(s) = \frac{R_L}{R_g + R_L}\frac{s+ \frac{1}{C R_L}}{s+ \frac{1}{C \left( R_L + R_g \right)}}\]
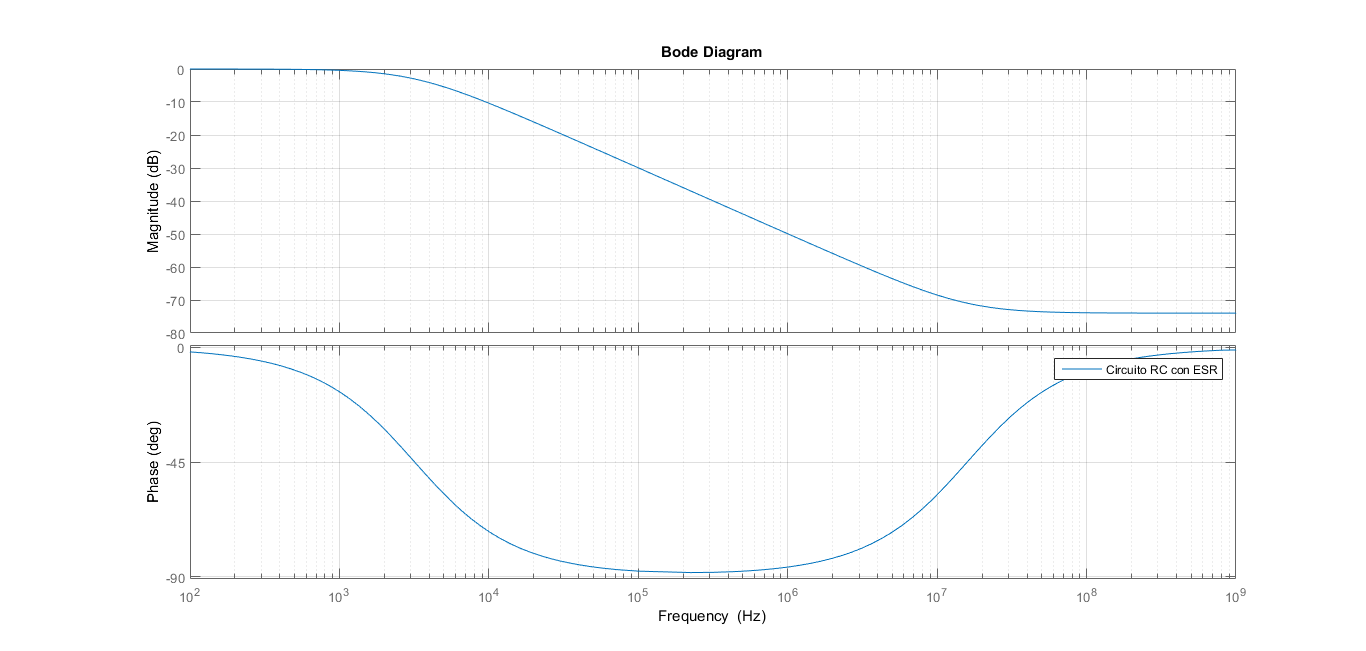
Como vemos, la función de transferencia tiene un cero en \(f_c = \frac{1}{2 \pi C R_L}\) y polo en \(f_p = \frac{1}{2\pi C \left( R_L + R_g\right) }\). El cero fuerza un pendiente a partir de \(f_1\) de -20 dB/dec, mientras que el polo fuerza una pendiente de +20 dB/dec a partir de \(f_2\), tal y como vemos en el diagrama de bode:
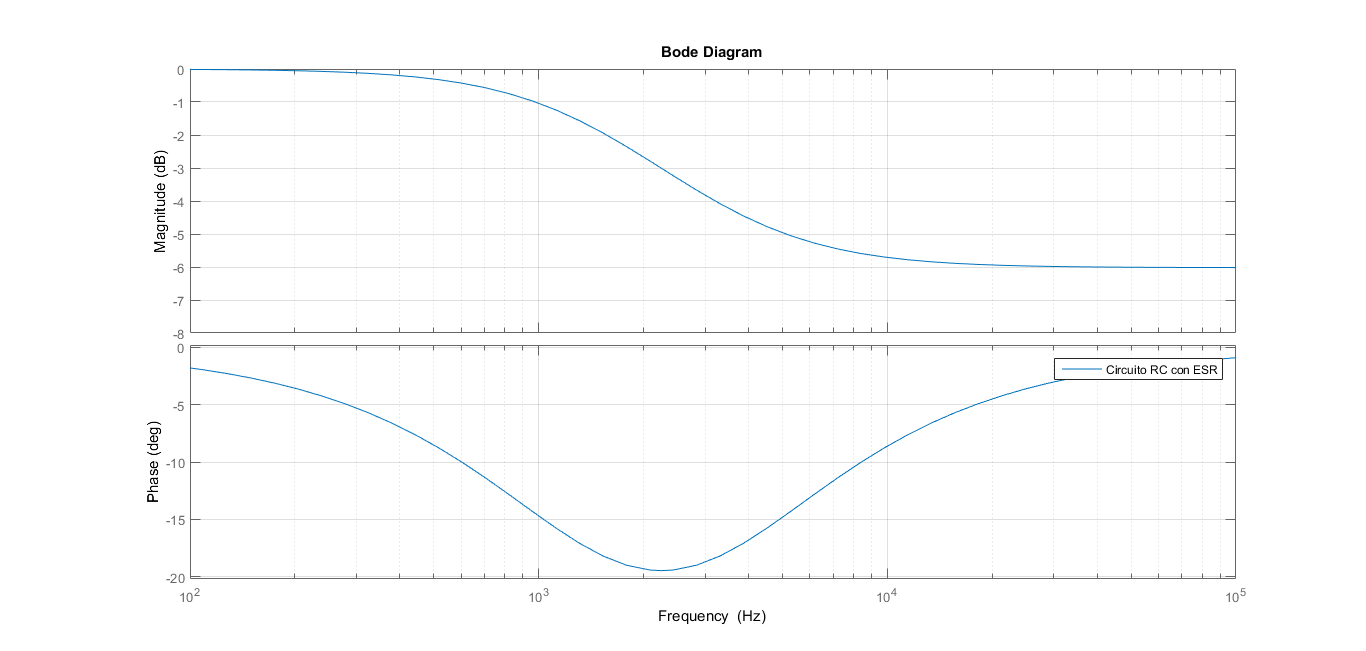
Como vemos, el cero anula al polo de manera que la respuesta en frecuencia es plana para altas frecuencias (en la realidad el inductor en serie hace que aumente. Sin embargo, ahora no se están contemplando sus efectos). La frecuencia del polo está por debajo de la frecuencia del cero \(f_p < f_c\). Además, la frecuencia del cero está determinada por el valor de la resistencia en serie y por el valor del condensador. Por tanto, si hacemos \(R_L\)muy pequeña, estaremos retardando el efecto del cero y con ello, haciendo que la respuesta frecuencial del condensador sea igual a la del caso ideal en un ancho de banda mayor.
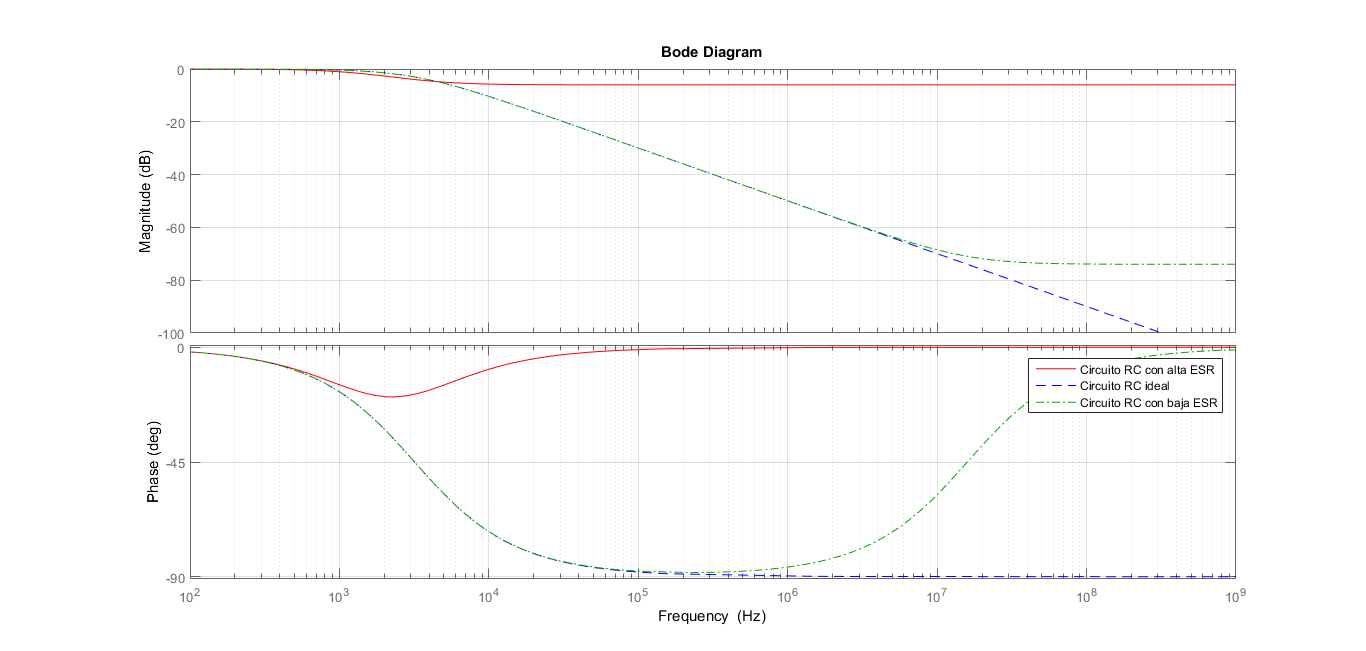
Si hacemos \(R_L = 0.01 \Omega\), las características de condensador (disminución de impedancia al incrementar la frecuencia) se dan para un ancho de banda mayor:
A modo de comparativa, podemos observar las diferencias mejor si superponemos todos los diagramas de bode.
El script de MATLAB utilizado para simular y hacer estas gráficas es:
clear all;
close all;
s = tf('s');
Rg = 50;
RL = 50;
RLow = 0.01;
C = 1e-6;
%% Con ESR
H1 = ((1+s*C*RL)/(s*C*(Rg+RL)+1));
%% Sin ESR
H2 = (1/(C*Rg))/(s+1/(C*Rg));
%% Con bajo ESR
H3 = ((1+s*C*RLow)/(s*C*(Rg+RLow)+1));
bode1 = bodeplot(H1,'r',H2,'b--', H3, 'g-.');
setoptions(bode1, 'FreqUnits', 'Hz');
legend('Circuito RC con alta ESR', 'Circuito RC ideal', 'Circuito RC con baja ESR');
grid on;
Conclusión
Como vemos, debido a efectos parásitos como la resistencia en serie (ESR), el condensador deja de comportarse como tal a partir de una determinada frecuencia. Por debajo de ella, el condensador puede ser utilizado como tal. En los datasheets, este parámetro viene expresado como ESR aunque generalmente, se engloba dentro de un parámetro más general que es el factor de calidad Q.