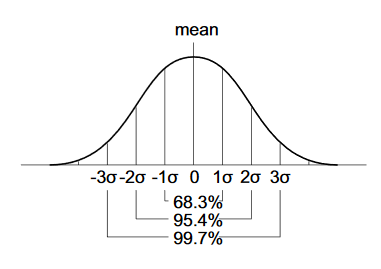
El porcentaje de muestras que están dentro de un conjunto que tiene una distribución gaussiana, puede describirse en función de \(\sigma\).
El porcentaje de muestras que están dentro de un conjunto que tiene una distribución gaussiana, puede describirse en función de \(\sigma\).
Para calcular la inducción mutua y la corriente inducida por un campo magnético producido por otra bobina, es posible utilizar COMSOL Multiphysics. En COMSOL, una bobina multivuelta es posible modelarla mediante una aproximación homogeneizada o modelo concentrado (como un toroide cilíndrico) en lugar de definir explícitamente cada una de sus espiras.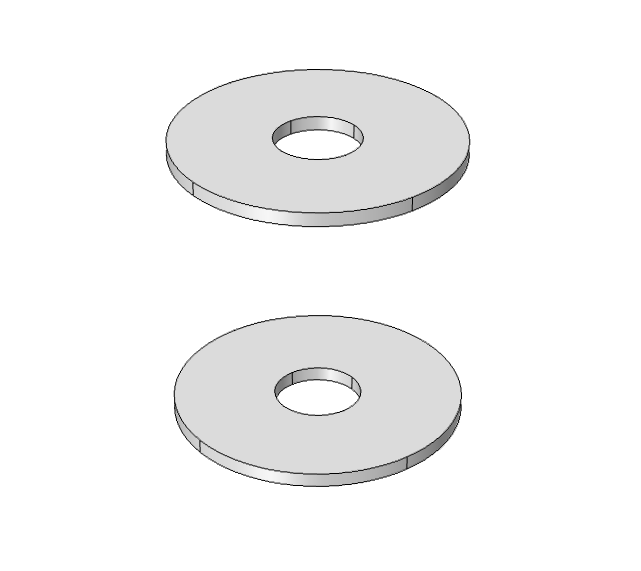 Para ello, hay que utilizar el nodo Multi-turn Coil. El nodo Multi-turn Coil modela el cilindro como un conjunto de hilos pequeños separados por un aislante eléctrico. La corriente fluye solo en una de las direcciones del cable y es despreciable en cualquier otra dirección. También es posible utilizar el nodo distorsión armónica que añade distorsión en la excitación de la bobina.
Para ello, hay que utilizar el nodo Multi-turn Coil. El nodo Multi-turn Coil modela el cilindro como un conjunto de hilos pequeños separados por un aislante eléctrico. La corriente fluye solo en una de las direcciones del cable y es despreciable en cualquier otra dirección. También es posible utilizar el nodo distorsión armónica que añade distorsión en la excitación de la bobina.
Para esta simulación, la bobina inferior será la que creará el campo magnético mediante una corriente de 1 A. La bobina superior será sobre la que haremos las medidas, tanto de la tensión en circuito abierto como de la corriente en cortocircuito.
Para empezar, es necesario determinar qué tipo de estudio vamos a realizar, cómo vamos a describir la geometría y qué cálculos querremos hacer. Para ello, utilizaremos el Model Wizard. En él seleccionaremos un espacio 2D axisimétrico para utilizar la simetría axial de las dos bobinas y reducir el tiempo de simulación. Sin embargo, también podemos un espacio tridimiensional para definir la geometría. Para realizar los cálculos de corriente inducida, inducción mútua y demás, solo es necesario saber el campo magnético inducido por una de las bobinas. Por tanto, solo añadiremos la física de los campos magnéticos seleccionando AC/DC > Magnetic Field (mf). El estudio que haremos será del comportamiento en frecuencia de las bobinas por lo que seleccionaremos Frequency Domain en el tipo de estudio.
Una vez creado el proyecto, añadiremos los parámetros de la geometría de las bobinas.
| Name | Expression | Value | Description |
| r_wire | 1 [mm] | 0.001 m | Radius, wire |
| R1 | 5 [cm] | 0.05 m | Radius, coil 1 |
| R2 | R1 | 0.05 m | Radius, coil 2 |
| N1 | 20 | 20 | Number of turns coil 1 |
| N2 | 20 | 20 | Number of turns coil 2 |
| d | 5 [cm] | 0.05 m | Distance between coils |
La geometría va a constar de:
La bobinas bobinas van a tener un arrollamiento plano, igual que las que se muestran el figura de arriba.
Creamos un rectángulo de anchura r_wire*N1 y altura r_wire. En la pestaña Position, r = R1-r_wire*N1, z = -d/2-r_wire*N1
Creamos un rectángulo de anchura r_wire*N2 y altura r_wire. En la pestaña Position, r = R2-r_wire*N2, z = d/2
Creamos un círculo con radio 2.25*R1, sector angle = 180º. En Rotation Angle, Rotation=-90º. En la pestaña Layers, creamos una nueva capa de 25 mm. Esta nueva capa va a dividir el circulo en dos 3 partes. La interna será el aire que envolverá las bobinas y las otras dos serán los elementos infinitos. Los elementos infinitos es un concepto que simula que el espacio alrededor de nuestro objeto sea infinito. Para ello, hace que los campos que llegan a esta capa no rebotan y son totalmente absorbidos, simulando que el campo o la onda sigue propagándose.
Añadimos un nodo Fillet en geometría. Añadimos los 8 vértices de los rectángulos y definimos un radio de r_wire/2.
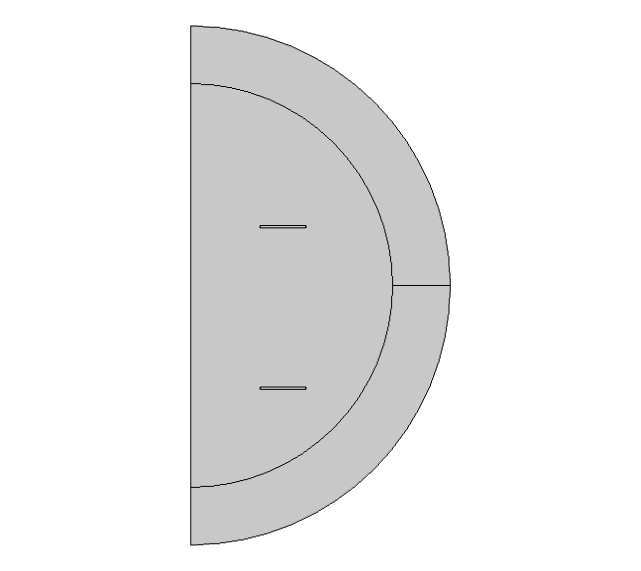
Con todo esto, obtendremos una geometría similar a la siguiente:
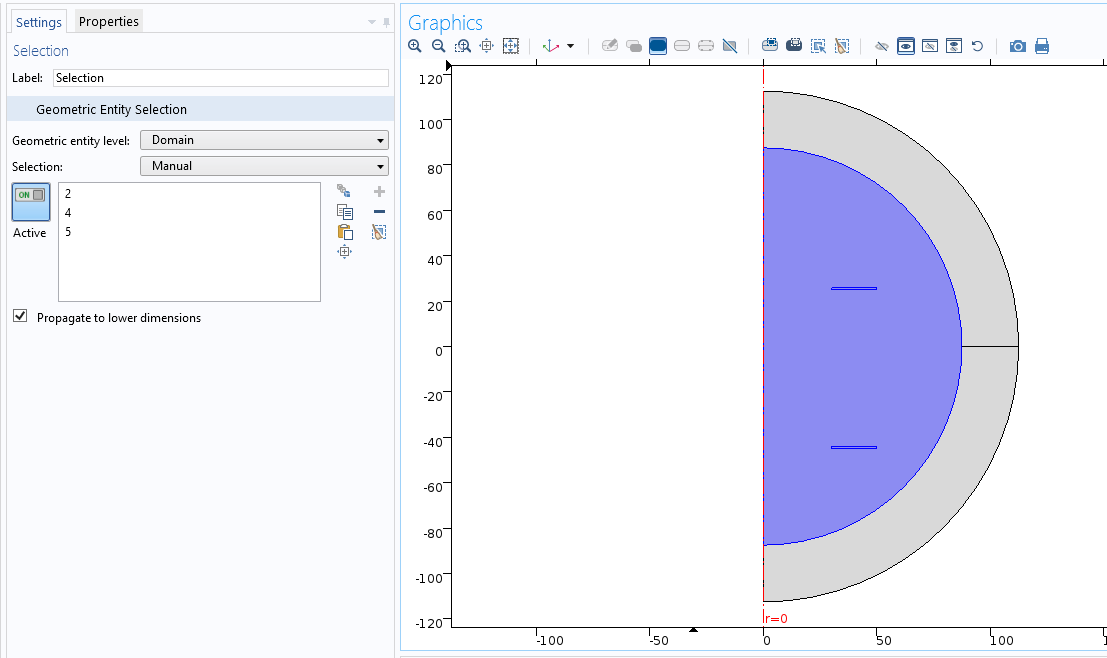
En Component1 > Definitions creamos un nodo Infinite Element Domain y seleccionaremos los dos dominios que hemos creado con la capa de 25 mm en el círculo. Los dominios que tenemos que seleccionar son los que se muestran en azul:

Primero añadiremos el material de aire, en Built-in > Air para que se añada a todos los dominios. Finalmente, añadimos el material de cobre AC/DC > Copper y se lo asignamos a las dos bobinas.
Para la física, tendremos que añadir dos nodos Multi-Turn Coil para cada una de las bobinas. La bobina 1 tendrá como excitación una corriente de 1 A. Por tanto \(I_{coil} = 1 ~A\), N = N1 y la sección del cable \(\pi r^2_{wire}\).
En el otro nodo Multi-Turn Coil, cambiaremos la sección del cable. Si queremos hacer una medida en circuito abierto, seleccionaremos la excitación de la bobina como tensión y la pondremos a 0 V. Si lo que queremos es hacer una medida en cortocircuito, la excitación será corriente y la corriente igual a 0 A.
Por último falta especificar a qué frecuencia queremos realizar la simulación. Para ello, en el subnodo Step 1 de Study 1 espeficamos la frecuencia que queramos. Por ejemplo, 1 kHz. Una vez descrita la física y el estudio ya podemos simular. Antes de simular podemos hacer click sobre el nodo de Study 1 y deseleccionar la opción que genera gráficas por defecto para el estudio de campo magnético. Una vez hayamos terminado, hacemos click en Compute.
Una vez COMSOL termine la simulación, si creamos una gráfica veremos como aparentemente no ha simulado nada, habiendo un pequeño punto en la capa de elementos infinitos que tiene un color diferente de azul. Esto es debido a que existe una singularidad en este punto haciendo que la simulación tienda a infinito. Por culpa de esto, hace que todos los valores en comparación a este sean muy pequeños y apenas sean visibles en la escala de colores. Para evitar esto, es necesario especificar qué dominios del estudio queremos visualizar. Para ello, hacemos click derecho en el nodo Study 1/Solution 1 y creamos un subnodo de Selection. En geometric entity level cambiamos Entire geometry por Domain y seleccionamos solo el aire y las dos bobinas, dejando los elementos infinitos fuera de la selección.
 Ahora ya podemos visualizar correctamente los resultados de campo magnético que ha generado por defecto COMSOL.
Ahora ya podemos visualizar correctamente los resultados de campo magnético que ha generado por defecto COMSOL.

La inducción mútua se calcula como:
\[ L_{12} = \frac{N_2}{I_1} \int B\cdot dS \]
Implementando esta ecuación como una integral en el área de la bobina superior de la componente del flujo magnético en Z se consigue la inducción mutua entre ambas bobinas.
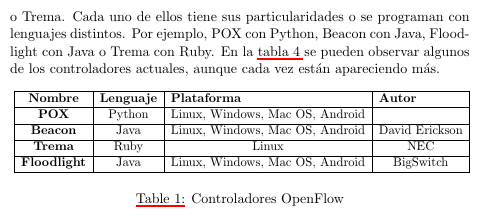
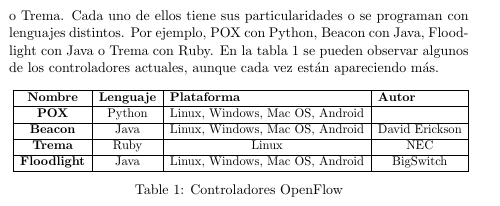
Si el número que aparece como referencia al referenciar un objeto (imagen, ecuación, tabla, etc.) mediante el comando \ref{} no coincide con el del elemento, es porque la sentencia \caption{} aparece después de la de \label{}.
\caption{Controladores OpenFlow}
\label{table:controllers}Esto ocurre porque elementos numerados como /section, \begin{equation} o \caption utilizan un contador para saber qué número es el siguiente elemento. Este contador es \refstepcounter y sirve para incrementar el contador que lleva la cuenta del número de índice de un capítulo, número de ecuación o número de figura. Cuando se escribe una etiqueta \label se guarda esa información en el archivo .aux con el fin de que cuando se escriba \ref en el documento, sepa cuál de todos los contadores debe mostrar para esa referencia. Cuando se está dentro de un entorno como por ejemplo \begin{equation} o \begin{figure} se le está diciendo a \label que incremente el contador de ese entorno. Lo mismo ocurre con table. Por tanto, cuando se pone \label antes que \caption, se incrementa el contador de \label y se muestra el número erróneo en \ref
Para ver los cambios puede que sea necesario recompilar un par de veces.
En el terminal:
sudo nano /etc/default/grub
Cambiar:
GRUB_CMDLINE_LINUX_DEFAULT="quiet splash"
por:
GRUB_CMDLINE_LINUX_DEFAULT="quiet splash intel_idle.max_cstate=1 acpi_osi= acpi_backlight=native"
Una vez hecho el cambio, guardar el archivo.
sudo update-grubFinalmente, reiniciar el equipo.
Las teclas(Fn+F5/F6) deberían volver a funcionar.
Quizá sea necesario reconfigurar después de cada actualización del sistema.
Una red eléctrica se considera lineal cuando \(v_s(\omega t)\) y \(i_s (\omega t)\) son senoidales.
La tensión de pico es mayor que el valor eficaz:
\[v_{pk} = \sqrt{2}v_{rms} \]
Un inductor retrasa \(\frac{\pi}{2}\) la corriente: \(\sin{(x+a)}\)
Un condensador adelanta \(\frac{\pi}{2}\) la corriente: \(\sin{(x-a)}\)
En trifásica hay tres fases:
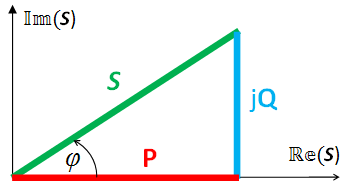
Factor de potencia:\( FP = \frac{P}{S} = \cos{(\phi)} \)
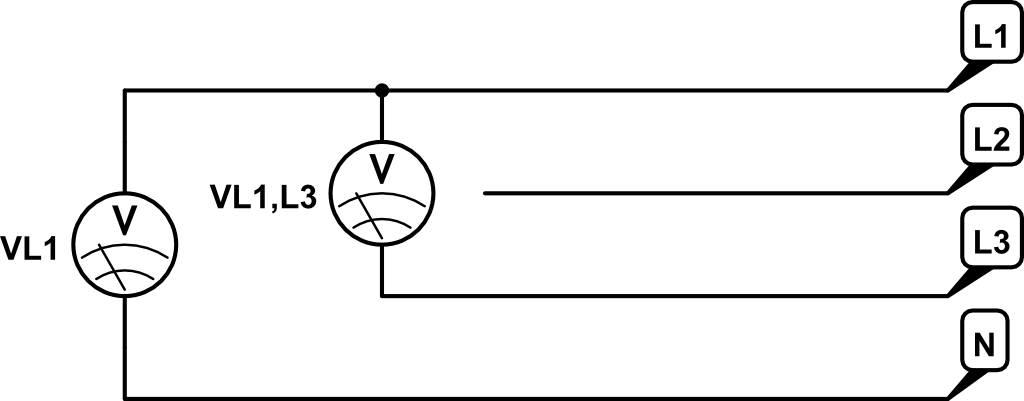
La tensión de fase es la tensión que existe entre el neutro y una de las fases. En el dibujo \(V_{L_1}\).
La tensión de línea es la tensión que hay entre dos fases, en el dibujo \(V_{L_1, L_3}\). La tensión de línea puede escribirse como:
\[ V_{L_1, L_3} = V_{L_1} – V_{L_3}\]
En cuanto al módulo de la tensión de línea, este es mayor que la de fase:
\[ V_{L_1, L_3} = \sqrt{3} V_{L_1}\]
Una red equilibrada es aquella en que el desfase relativo entre fases es 0. Es decir, todas las fases tienen un desfase igual.
La potencia en una red equilibrada (\(\phi_1 = \phi_2 = \phi_3 = \phi\)) es:
\[ P_i = V_{RMS} I_{RMS} \cos{(\phi)} \]
\[ P = 3 P_i = 3 V_{RMS} I_{RMS} \cos{(\phi)} = \sqrt{3} V_{L_{RMS}} I_{RMS} \cos{(\phi)} \]
Además, la tensión de línea está desfasada 60º respecto a la de fase:

En caso de que la red sea desequilibrada (\(\phi_1 \neq \phi_2 \neq \phi_3\)):
Por cada fase tendremos una potencia activa (P) y aparente (Q):
\[ P_i = V_{i_{RMS}} I_{i_{RMS}} \cos{(\phi_i)} \]
\[ S_i = V_{i_{RMS}} I_{i_{RMS}} \]
\[ FP_i = \frac{V_{i_{RMS}} I_{i_{RMS}} \cos{(\phi_i)}}{V_{i_{RMS}} I_{i_{RMS}}} = \cos{(\phi_i)} \]
La potencia total será:
\[ P = \sum_i{P_i} \]
\[ Q = \sum_i{Q_i} \]
\[ S \neq \sum_i{S_i} \]
\[ S = \sqrt{P^2+Q^2} \]
\[ FP = \frac{P}{S} \]
Distorsión en redes no lineales
Una red se considera no lineal cuando \(v_{s}(\omega t)\) es senoidal y \(i_s(\omega t)\) no. Una señal periódica no senoidal puede expresarse como suma de diferentes componentes frecuenciales multiplos de la frecuencia fundamental, es decir, mediante su desarrollo en serie de Fourier (DSF).
\[ i_s(\omega t) = I_{s,0} + i_{s,1}(\omega t) + \sum_{k=2}^{+\infty} i_{s,k}(\omega t) \]
Podemos agrupar los términos como una componente de continua, una componente frecuencial y la suma de todos los armónicos:
\[ i_s(\omega t) = I_{s,0} + i_{s,1}\sin(\omega t – \phi_1) + \sum_{k=2}^{+\infty} i_{s,k}\sin(\omega t – \phi_k) \]
Donde la amplitud de la componente fundamental será \(I_{s,1} = \sqrt{2} I_{s,1~rms} \) y la de los armónicos: \( \left.I_{s,k}\right|_{k=2,3,…\infty} = \sqrt{2} I_{s,k~rms} \).
La distorsión de la corriente es igual a la diferencia entre la señal completa menos la componente fundamental:
\[ i_{s,dis}(\omega t) = i_s (\omega t) – I_{s,1}\sin(\omega t) = \sum_{k=2}^{+\infty} i_{s,k}\sin(\omega t – \phi_k)\]
El valor eficaz de una señal es:
\[ I_{s~RMS} = \sqrt{\frac{1}{2\pi} \int_0^{2\pi} i^2_{s}(\omega t)~d\omega t}\]
La distorsión de una señal calculada como valor eficaz es:
\[ I_{s,dis~RMS} =\sqrt{I^2_{s~RMS} – I^2_{s,1 RMS}} \]
Y la distorsión armónica de una señal será la relación entre el valor eficaz de la distorsión y el valor eficaz de la componente fundamental. Dado que la distorsión de la señal puede ser mucho mayor que la componente fundamental, el THD puede tomar valores mayores a 1.
\[ THD = \frac{I_{s,dis~RMS}}{I_{s,1~RMS}} = \sqrt{\frac{I^2_{s~RMS}}{I^2_{s,1}}-1} \]
Si la red es lineal, la corriente tendrá la misma forma que la tensión. Como la tensión de senoidal, la corriente también lo será. Por tanto, la distorsión armónica de una red lineal es 0.
La potencia aparente es el producto de la tensión eficaz que entrega la red y la corriente eficaz que entrega la red.
\[ S = V_{s~rms} \cdot I_{s~rms} \]
La potencia activa es el producto de la tensión eficaz que entrega la red con la corriente eficaz del armónico fundamental de la corriente y con un factor de corrección debido al desfase entre la corriente y la tensión:
\[ P = V_{rms} I_{s,1~rms}\cos{\phi_1} \]
El factor de potencia (FP) de es la relación entre la potencia activa y la potencia aparente:
\[ FP = \frac{P}{S} = \frac{V_{rms}I_{s,1~rms}\cos{\phi_1}}{V_{rms} I_{s~rms}}=\frac{I_{s,1~rms}}{I_{s,rms}} \cos{\phi_1}=\underbrace{\frac{I_{s,1~rms}}{I_{s,rms}}}_{\text{Factor de distorsion}}\underbrace{\cos{\phi_1}}_{\text{Factor de desplazamiento}} \]
En el caso de ser un red trifásica, el factor de potencia es la media de cada una de las lineas:
\[ FP_{trifasica} = \frac{\sum_i FP_i}{3} \]
El THD también puede calcularse como:
\[THD = \sqrt{\left(\frac{\cos{\phi_1}}{FP}\right)^2-1}\]
Los convertidores conmutados consumen corrientes armónicas. Esto causa que la corriente que la red entrega a la carga no tenga la misma forma que la tensión, o dicho de otro modo, que la frecuencia de la corriente sea diferente de la fundamental. Esto produce tanto distorsión armónica en la corriente suministrada por la red como distorsión de la tensión en el punto de conexión. Este último efecto es debido a que la línea tiene una impedancia distinta de 0 a la frecuencia de los armónicos y se produce una caída de tensión.
Para corregir esta situación, se pueden filtrar los armónicos de la corriente mediante redes pasivas resonantes o también se pueden emplear filtros activos en serie o en paralelo mediante inversores. Sin embargo, estas medidas son complicadas o no resuelven el problema de fondo que es que el convertidor está consumiendo corriente de manera poco eficiente.
Por ello, la mejor estrategia para solucionar este problema es utilizar rectificador de alto factor de potencia (HPF), los cuales reducen el consumo de armónicos de baja frecuencia en lugar de intentar atenuar los existentes. Este tipo de rectificadores modifican la forma de onda de la corriente de entrada para mejorar el espectro armónico y el factor de potencia. Existen varias maneras de clasificar un rectificador HPF: según la forma de la corriente absorbida (totalmente sinusoidal o simplemente se ajusta al máximo establecido por la normativa), según el número de semiconductores o según el estrés que sufren los semiconductores. (control en conducción continua, control en conducción discontinua o en el límite entre c.c. y c.d. o convertidores con redes resonantes para ZVS y ZCS).
Los rectificador HPF cuentan en esencia de dos etapas: la pre-regulación y la post-regulación.
El funcionamiento ideal del rectificador sería aquel en que la corriente que obtiene de la red debe ser sinusoidal y debe estar en fase con la tensión. Esto solo ocurre si la carga conectada a la salida del rectificador tiene un comportamiento idealmente resistivo.
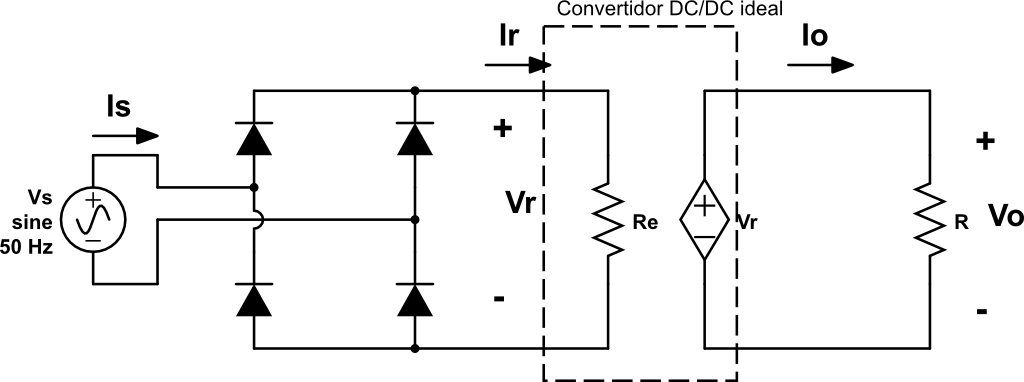 Como vemos en la figura de arriba, si el rectificador ve conectado a su salida una resistencia, en este caso \(R_e\), la corriente será sinusoidal y estará en fase con la tensión.
Como vemos en la figura de arriba, si el rectificador ve conectado a su salida una resistencia, en este caso \(R_e\), la corriente será sinusoidal y estará en fase con la tensión.
\[ i_r(t) = \frac{v_r(t)}{R_e}\]
En este caso, de manera ideal, la potencia que llega a la resistencia emulada (\(R_e\)) es transferida sin pérdidas a la carga \(R\). De manera que se cumple que:
\[ p(t) = \frac{v^2_r}{R_e} = \frac{V^2_o}{R} \]
 El convertidor DC/DC deberá actuar de forma dinámica variando el ciclo de trabajo para obtener una tensión de salida constante a partir de la tensión de entrada variable. Por tanto, la relación de transformación \(M(d(t))\) será:
El convertidor DC/DC deberá actuar de forma dinámica variando el ciclo de trabajo para obtener una tensión de salida constante a partir de la tensión de entrada variable. Por tanto, la relación de transformación \(M(d(t))\) será:
\[ M\left( d(t) \right) = \frac{v_o(t)}{v_r(t)} = \frac{V_{DC}}{V_m\left|\sin(\omega t)\right|} \]
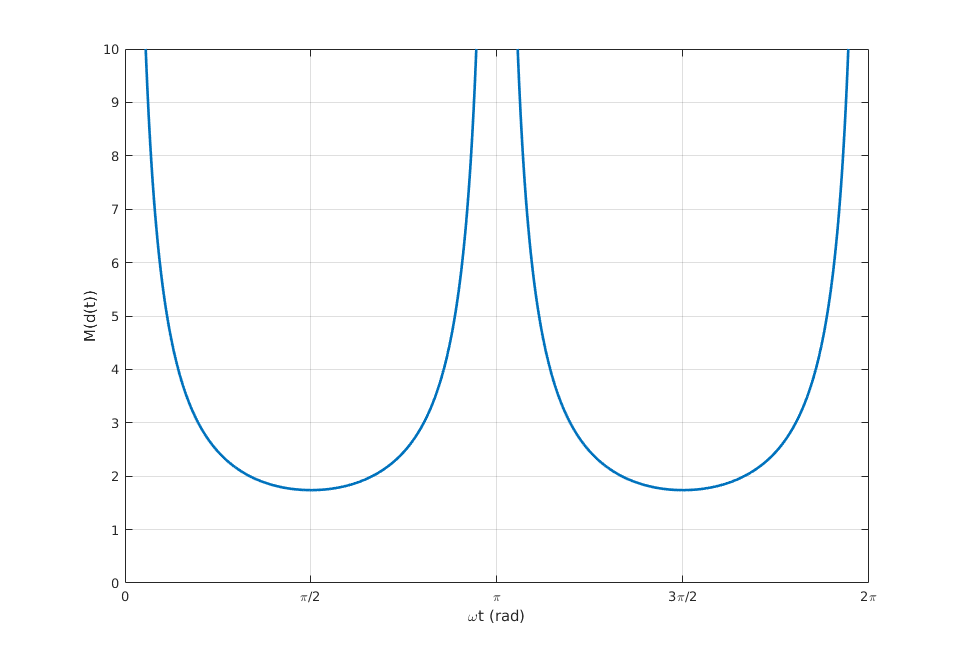 Por tanto, cualquier convertidor que sea capaz de tener esta función de transferencia, podrá generar una tensión continua a la salida obteniendo de la red una corriente con forma sinusoidal y en fase con la tensión.
Por tanto, cualquier convertidor que sea capaz de tener esta función de transferencia, podrá generar una tensión continua a la salida obteniendo de la red una corriente con forma sinusoidal y en fase con la tensión.
Las formas de onda de la tensiones y las corrientes en el convertidor son:
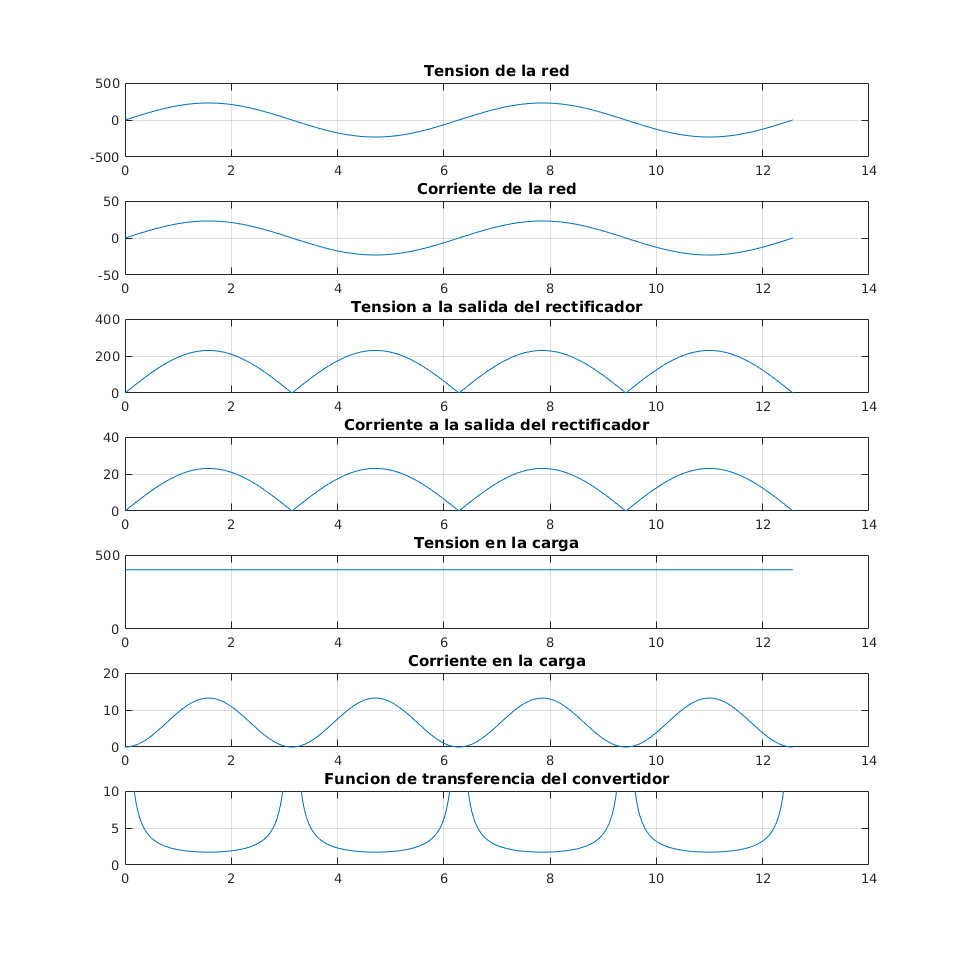 Debido a que se conserva la potencia que recibe la carga emulada \(R_e\), la corriente en la carga \(R\) es:
Debido a que se conserva la potencia que recibe la carga emulada \(R_e\), la corriente en la carga \(R\) es:
\[i_o = \frac{v_r(t)\cdot i_r(t)}{V_o} = \frac{V^2_m}{2\cdot V_o \cdot R_e}\left(1-cos(2\omega t) \right) \]
Por tanto, la corriente de salida tiene una componente DC de valor \(\frac{V^2_m}{2\cdot V_o \cdot R_e}\) y una componente frecuencial a \(2f_{red}\) que puede ser filtrado.
Sin embargo, como se puede observar, en los puntos en los que la tensión \(V_r\) es 0, en \(0, \pi, 2\pi\), el convertidor debe ser capaz de obtener \(V_{DC}\) a la salida. Esto implica que la función de transferencia tienda a infinito (lo que en la práctica no es posible). Debido a esta limitación, se producirá un error en la forma de onda de la corriente absorbida por el DC/DC en los pasos por 0, teniendo una distorsión armónica diferente de 0 pero muy reducida.
A la hora de elegir el tipo de convertidor DC/DC, se tiene que tener en cuenta que este debe ser capaz de trabajar en todo el rango de M. Por ejemplo, un convertidor buck tiene una relación de transformación \(M\leq 1 \), por lo que en aquellos puntos en los que la tensión de entrada del convertidor sea menor que la tensión de salida objetivo, se pierde el control del convertidor y este no va a ser capaz de trabajar en esta zona.
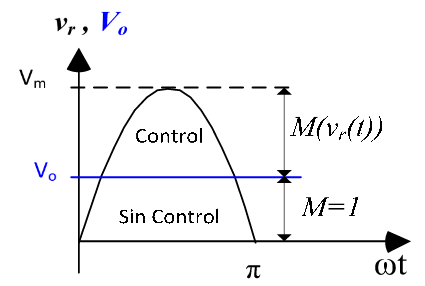 Lo más apropiado entonces sería utilizar un convertidor buck-boost. Sin embargo, debido a la disposición de la bobina en esta configuración (en derivación) no es posible hacer un control en corriente. El control en corriente es interesante debido a que es la magnitud que realmente queremos modelar. Por tanto teniendo en cuenta esta limitación, esta configuración no se suele utilizar.
Lo más apropiado entonces sería utilizar un convertidor buck-boost. Sin embargo, debido a la disposición de la bobina en esta configuración (en derivación) no es posible hacer un control en corriente. El control en corriente es interesante debido a que es la magnitud que realmente queremos modelar. Por tanto teniendo en cuenta esta limitación, esta configuración no se suele utilizar.
También se pierde el control del convertidor como ya se ha dicho en los puntos de la tensión de entrada \(V_r\) cercanos a 0, ya que el ciclo de trabajo en estos puntos tiende a 1 aunque no hay tensión. El convertidor boost (\(M\geq 1\)) es el más utilizado en pre-reguladores HPF monofásicos.
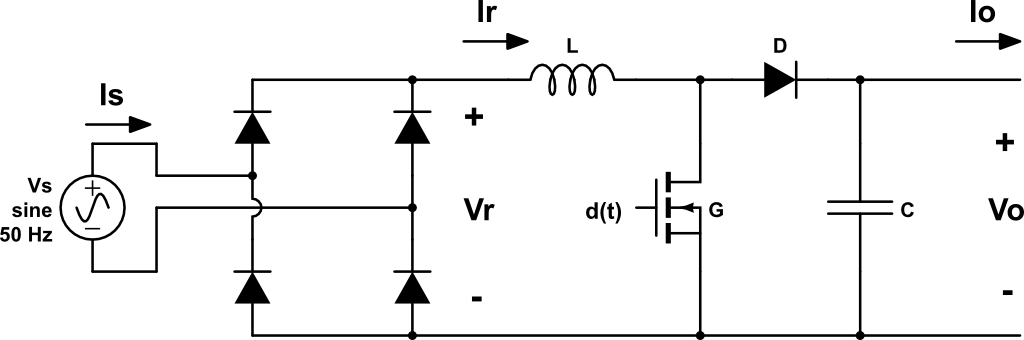
El pre-regulador monofásico mediante convertidor boost es el que se muestra en la figura. Idealmente, el convertidor boost puede producir cualquier ratio de conversión que esté entre 1 e infinito. La relación de transformación de este convertidor es:
\[ M(d(t)) = \frac{V_o}{V_r} = \frac{1}{1-d(t)}\]
Despejando el ciclo de trabajo:
\[ d(t) = 1-\frac{v_r(t)}{V_o}\]
donde \(V_o\) es la tensión continua que se quiere conseguir a la salida y \(v_r(t)\) es la tensión a la salida del rectificador. Sin embargo, esta expresión solo es cierta cuando la corriente en la bobina está en conducción continua.
Para garantizar la conducción continua, el rizado de corriente en la bobina debe ser menor o igual que 2 veces la corriente media en la bobina:
\[ \Delta i_L \leq 2i_{L(AV)}\]
Donde hay que tener en cuenta que la corriente media que pasa por la bobina es la corriente media que el rectificador toma de la red (\(i_{L(AV)} = i_{r(AV)}\)). Vamos a calcular primero el valor de la corriente media en la bobina (o lo que es lo mismo, de la red). La corriente de salida está relacionada con la corriente de entrada mediante la siguiente expresión:
\[ \frac{I_o}{I_{r~(AV)}} = 1 – D \]
Despejando \(I_{r~(AV)}\), tenemos:
\[ I_{r~(AV)} = \frac{I_o}{1 – D} = \frac{\frac{V_o}{R}}{1-D} = \frac{V_o}{R\left(1-D\right)}~~~(1)\]
Sin embargo, esta ecuación no nos relaciona la corriente media de salida con la resistencia emulada \(R_e\). Para poder relacionarlas, sabemos que la función de transferencia de la tensión es:
\[ \frac{V_o}{V_{r~rms}} = \frac{1}{1-D} \]
\[V_o = \frac{V_{r~rms}}{1-D}\]
Como R es la relación entre la tensión de salida y la corriente de salida:
\[ R = \frac{V_o}{I_o} = \frac{V_{r~rms}}{I_{r~rms}} \frac{1}{\left(1-D\right)^2} = \frac{R_e}{ \left( 1-D\right)^2 } \]
Donde \(R_e\) es la resistencia equivalente vista desde la salida del rectificador.
Retomando la expresión de la corriente de entrada (1):
\[ I_{r~(AV)} = \frac{V_o}{R\left(1-D\right)} = \frac{V_o}{R_e}\left(1-D\right) = \frac{V_{r~rsm}}{R_e}\]
\[ i_{r~(AV)} = \frac{v_r(t)}{R_e}\]
Por lo que ya tenemos la ecuación que relaciona la corriente media que proporciona la red con la resistencia emulada \(R_e\).
Ahora vamos a calcular la otra parte de la inecuación y tener las condiciones que aseguran que el convertidor trabaja en conducción continua, que interesa como hemos visto para que la relación de transformación sea válida. El rizado de corriente en el convertidor boost es:
\[ \Delta i_r = \frac{v_r(t)}{L}d(t)T_{s}\]
Por tanto, como habíamos dicho y siendo \(i_L = i_r\), para garantizar conducción continua:
\[ \Delta i_L \leq 2i_{L(AV)}\]
\[ \frac{v_r(t)}{L}d(t)T_{s} < 2\frac{v_r(t)}{R_e} \]
Despejando \(R_e\):
\[ R_e < \frac{2L}{d(t)T_{s}} \]
Despejando \(d(t)\):
\[ d(t)< \frac{2L}{R_e T_{s}} \]
Si se cumplen estas ecuaciones, el convertidor estará en conducción continua y la relación de transformación que nos interesa se cumplirá. Sin embargo, estas últimas ecuaciones las podemos reescribir de la siguiente manera:
\[ R_e < \frac{2L}{\left(1-\frac{v_r(t)}{V_o}\right)T_{s}} \]
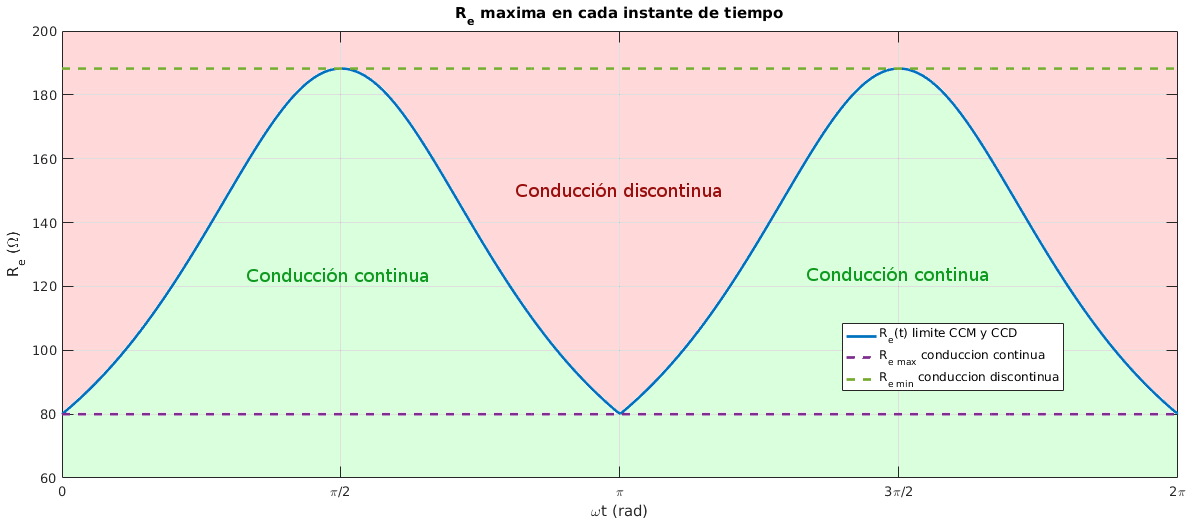
Como \(v_r(t) = V_M \left| \sin(\omega t) \right|\), es decir que \(0\leq V_r \leq V_M\), el valor máximo que puede tener \(R_e\) sea da cuando \( \frac{2L}{\left(1-\frac{v_r(t)}{V_o}\right)T_{s}}\) sea mínimo. Y esto sucede cuando el denominador es máximo. Dicho de otro modo, el máximo valor que puede tomar \(R_e\) se da cuando \(v_r(t) = 0\). Por tanto, el máximo valor de \(R_e\) que hace que el convertidor esté trabajando en modo corriente continua es:
\[ R_e < \frac{2L}{T_s} \]
El valor de \(R_e\) nos va a servir para diseñar la bobina del convertidor. Sabiendo que:
\[ R_e = \frac{V^2_{r(rms)}}{P_o} = \frac{V^2_m}{2P_o} \]
Entonces, sustituyendo:
\[ \frac{V^2_m}{2P} < \frac{2L}{T_s} \Rightarrow L > \frac{V^2_m \cdot T_s}{4P} \]
Por tanto, este será el mínimo valor de inductancia que conseguirá que el convertidor esté trabajando en modo conducción continua.
Sin embargo, el valor de la inductancia de la bobina no será cualquier valor por debajo del mínimo. De hecho, en muchos casos tendremos impuesto un rizado máximo de corriente en la bobina. En ese caso, la expresión del rizado de la corriente en la bobina será el que limitará el mínimo valor de la inductancia. De la ecuación del rizado de la corriente en el convertidor boost:
\[ \Delta I_L = \frac{V_{r~rms}}{L}DT_s = \left\{ \frac{V_o}{V_{r~rms}} = \frac{1}{1-D} \right\} = \frac{V_o}{L} D \left(1-D\right)T_s \]
Despejando L:
\[ L = \frac{V_o}{\Delta I_L} D \left(1-D\right)T_s \]
El valor del ciclo de trabajo D que maximiza la ecuación es \(D = 0.5\).
\[ \left. D \cdot \left(1-D\right)\right|_{D=0.5} = 0.25 = \frac{1}{4} \]
 Teniendo este valor en cuenta, para cumplir que el rizado de corriente sea menor que el exigido:
Teniendo este valor en cuenta, para cumplir que el rizado de corriente sea menor que el exigido:
\[ L > \frac{V_o}{4\Delta I_L} T_s \]
De esta manera quedaría totalmente diseñada la bobina.
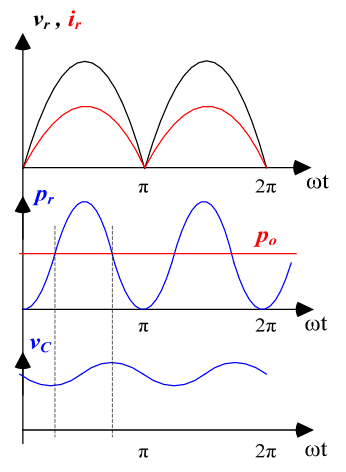
El último componente que queda por determinar es el condensador. La función del condensador es la de proporcionar potencia a la salida cuando la potencia suministrada por la red es 0. Debido a que la corriente está en fase con la tensión y tienen la misma forma de onda, en \(\pi\) y \(2\pi\) la potencia es que entrega la red es 0. Sin embargo, la potencia que queremos entregar a la carga es constante. Para arreglar esta situación, el condensador se cargará en un cuarto de periodo almacenando energía y se descargará en el otro cuarto de periodo. Esta situación se muestra en la siguiente figura:
 La potencia que suministra la red es:
La potencia que suministra la red es:
\[ p_r(t) = v_r(t) \cdot i_r(t) = \frac{V^2_m}{R_e}\sin^2(\omega t) = \frac{V^2_m}{2R_e}\left[1-\cos\left(2\omega t\right)\right]\]
La potencia media entregada a la carga, será la potencia media suministrada por la red:
\[ P_{r(AV)} = P_o = \frac{V^2_m}{2 R_e}\]
La potencia suministrada por el condensador debe ser la diferencia entre la que pide la carga y la que entrega la red:
\[ p_c(t) = p_r(t) – p_o(t) \]
La energía almacenada en un condensador es:
\[ E_c = \frac{1}{2} C V^2_c \]
Por tanto, la potencia del condensador será:
\[ p_c(t) = \frac{dE(t)}{dt} = \frac{d}{dt}\left[\frac{1}{2} C v^2_c(t)\right] \]
Para asignar direcciones link-local en IPv6 el mecanismo es igual que en las global unicast con la excepción de que el prefijo de la dirección ahora será FE80::/10 y los últimos 64 bits serán asignados mediante EUI-64 (Extended Unique Identifier) o de manera aleatoria.
En IPv6 es posible asignar automáticamente direcciones unicast globales de dos maneras:
Un host obtiene el prefijo, la longitud del prefijo y su router por defecto de un router IPv6. El host solicitará al router estos datos mediante el protocolo ICMPv6 y el router responderá con mensaje Router Advertisement (RA) que tendrá como dirección de origen la dirección link-local del router.
Estos mensajes RA pueden contener información solo de SLAAC, de SLAAC y DHCPv6 en el que se obtiene la IP de SLAAC y otros datos como el servidor DNS de DHCPv6 o finalmente contener solo información de DHCPv6.
Con SLAAC el router obtiene la interface ID de manera aleatoria o mediante EUI-64.
 El proceso para obtener la interface ID mediante EUI-64 es el siguiente:
El proceso para obtener la interface ID mediante EUI-64 es el siguiente:
En IPv6 existen tres tipos de direcciones:
Se utilizan para identificar de manera única a un dispositivo. Dentro de las direcciones unicast existen 6 tipos:
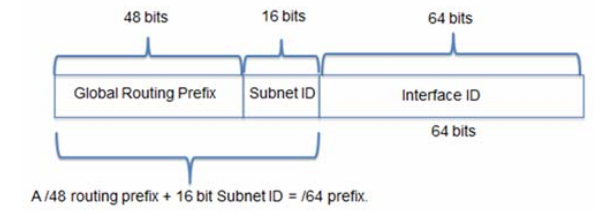
Las global unicast son las equivalentes a las direcciones públicas en IPv4 y son únicas a nivel global. Al igual que las direcciones públicas en IPv4 son rutables a través de internet. El rango de direcciones es el especificado por 2000::/3, es decir, que los tres primeros bits de la dirección deben ser 001, de manera que las direcciones están comprendidas en el rango de 2000:: hasta el 3FFF:FFFF:FFFF:FFFF.
Están formadas por un prefijo global, un identificador de subred y un identificador de interfaz (campo de host en IPv4)
Se utilizan para comunicarse entre dispositivos de una misma red y no son rutables (no pueden atravesar routers). Toda interfaz que tenga IPv6 activado debe tener asignada una dirección link-local y se le asigna automáticamente, aunque se puede cambiar posteriormente. Esta dirección es la que se utiliza para especificar el router por defecto en un host y también en algunos casos para especificar el siguiente salto en las tablas de ruta. El rango de direcciones es el FE80::/10.
Mismo concepto que en IPv4. Sirve para referenciarse a sí mismo o para probar la configuración de TCP/IP en un host. No se puede asignar a ninguna interfaz física y se representa como todos ceros excepto el último bit: ::1/128 ó simplemente ::1.
1.4. Unspecified address
Se representa con todo ceros ::/128 ó ::. Esta dirección no se puede especificar a ninguna interfaz y solo se puede usar como dirección de origen cuando el dispositivo todavía no tiene una IPv6 definida o cuando la dirección de origen es irrelevante.
Son equivalentes a las direcciones privadas en IPv4. No se puede salir a internet con ellas y se utilizan para dirigirse a hosts dentro de un sitio. Su rango es el FC00::/7.
Se utilizan para traducir direcciones IPv4 a IPv6. Su rango es ::/80. Existen dos tipos pero solo se utiliza el timo IPv4-mapped. Estas direcciones tienen el aspecto ::FFFF:w.x.y.z donde w, x, y, z son los bytes de una dirección IPv4.
Las direcciones multicast tienen el rango FF00::/8 y existen dos tipos:
Son direcciones predefinidas por la norma para dirigirse a determinados grupos de dispositivos.
| Dirección IP | Dispositivos |
| FF02::1 | Todos los nodos |
| FF02::2 | Todos los routers |
| FF02::5 | Routers OSPF |
| FF02::6 | Routers asignados OSPF |
| FF02::9 | Routers RIP |
| FF02::1:2 | Agente DHCP |
La dirección multicast que se dirige a todos los nodos (la FF02::1) es la equivalente a la dirección de broadcast en IPv4.
Se crean automáticamente cuando una dirección global unicast o una link-local son asignadas. Tienen la máscara FF02:0:0:0:0:1:FF00::/104, es decir FF02:0:0:0:0:1:FFXX:XXXX, donde las últimas XX:XXXX son los últimos 24 bits de la dirección unicast o link-local.
Este tipo de dirección multicast sirve para resolver las direcciones físicas MAC de una manera más eficiente a como se hacía en IPv4. En IPv4 se utilizaba el protocolo ARP para pedir a un host destino qué dirección MAC tenía. La dirección MAC es necesaria para que los switches sepan por qué puerto deben redireccionar un frame entrante. Con el protocolo ARP se utilizaban direcciones de broadcast para notificar al host destino que informara sobre su dirección MAC, por lo que toda la red se inundaba de paquetes broadcast que solo iban dirigidos a un único host. Una dirección multicast de nodo solicitado viene a resolver este problema, ya que los últimos 24 bits son los mismos que los de la dirección de link-local o unicast, de manera que un router puede dirigir mejor a qué hosts enviarlo. Puede que una solicitud de dirección MAC llegue a más de un host debido a que las direcciones link-local se pueden repetir en diferentes redes, pero el número de hosts que deben procesar y descartar el paquete porque no va dirigido a ellos es considerablemente menor. Este mecanismo de solución de direcciones se conoce como Neighbor Discovery Protocol (NDP).
Otra de las utilidades de la dirección de nodo solicitado es el de la detección de direcciones duplicadas (Duplicate Address Detection DAD)
Son direcciones que se pueden asignar a diferentes interfaces con la propiedad de que un paquete enviado a una dirección anycast es rutado por la interfaz más cercana que tenga esa dirección. El espacio de dirección que tienen está englobado dentro de las unicast, por lo que sintácticamente son indistinguibles de las direcciones unicast.
Fuente: RFC 2461
| Z | = | R | + | jX |
| Impedancia | Resistencia | Reactancia | ||
| Y | = | G | + | jB |
| Admitancia | Conductancia | Susceptancia |