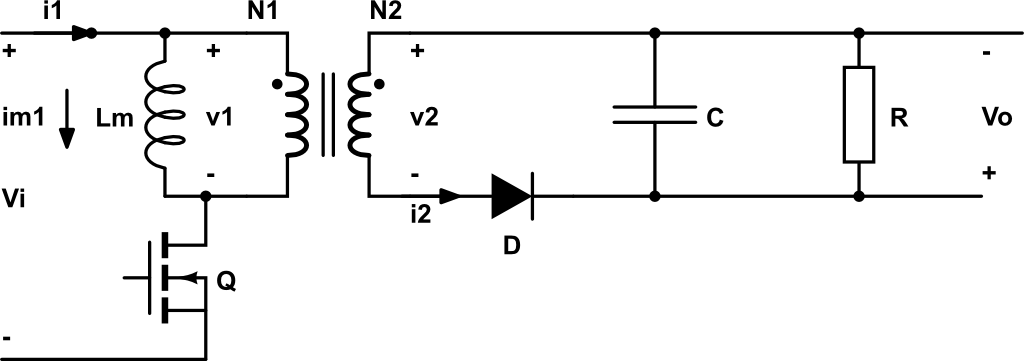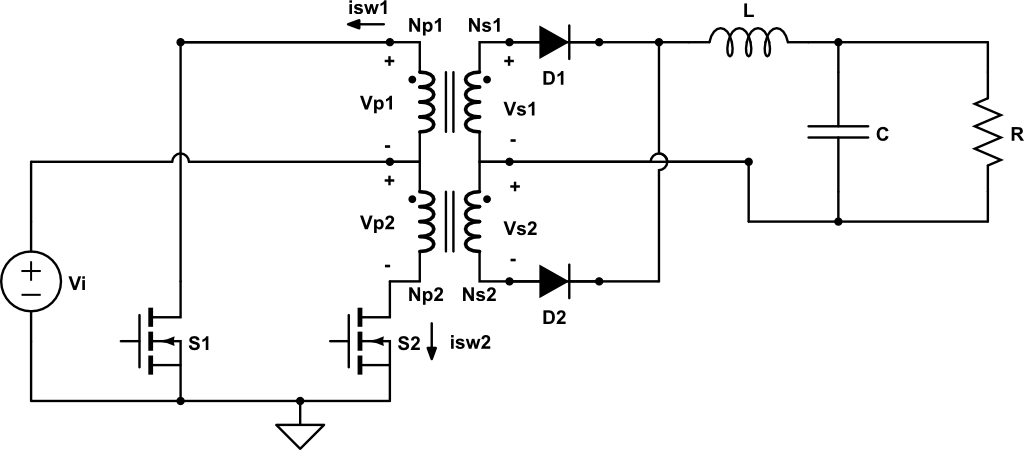
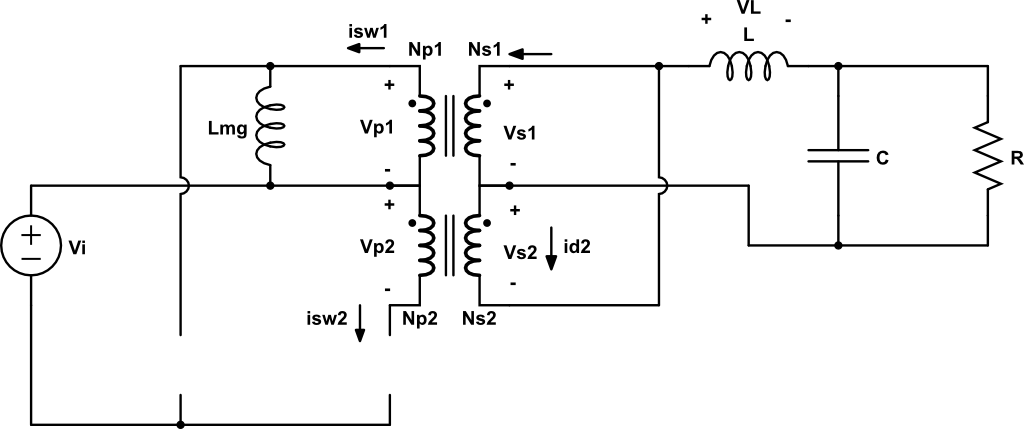
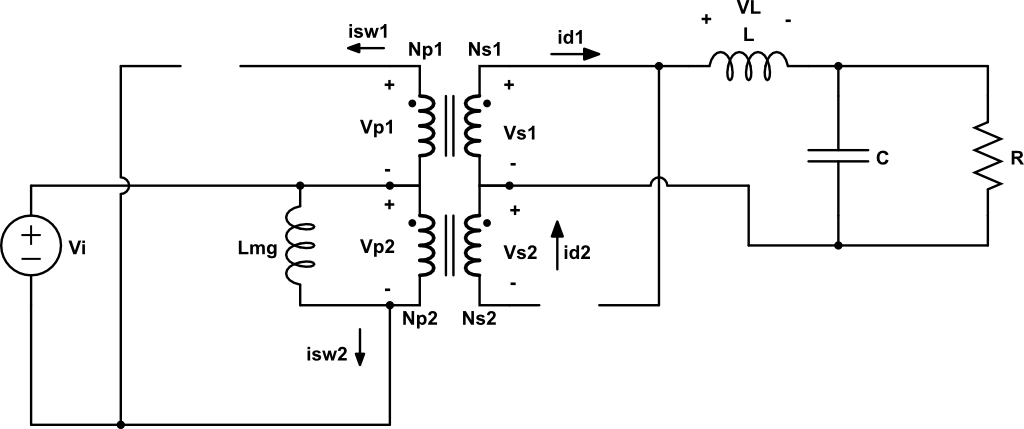
El convertidor push-pull trabaja en el primer y tercer cuadrante. Es decir, el transformador se magnetiza y se desmagnetiza en un periodo de trabajo. Está compuesto por una especie de inversor que convierte la tensión continua en «alterna» utilizando dos transistores y un rectificador de onda completa (transformador con toma intermedia y dos diodos) y un filtro paso bajo.
En este conversor tenemos 4 periodos de trabajo:
- \(0<t<D T_s\): S1 ON, S2 OFF
- \(D T_s<t<\frac{T_s}{2}\): S1 OFF, S2 OFF
- \(\frac{T_s}{2}<t<\frac{T_s}{2} + D T_s\): S1 OFF, S2 ON
- \(\frac{T_s}{2} + D T_s<t< T_s\): S1 OFF, S2 OFF
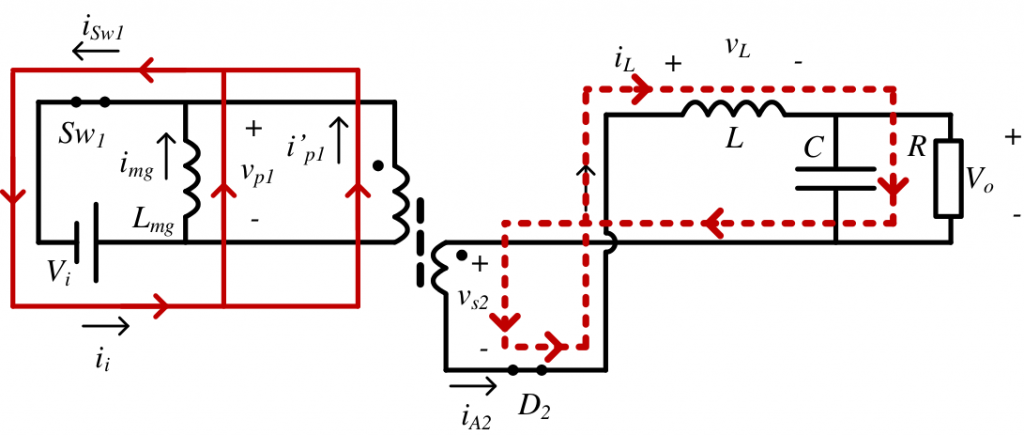
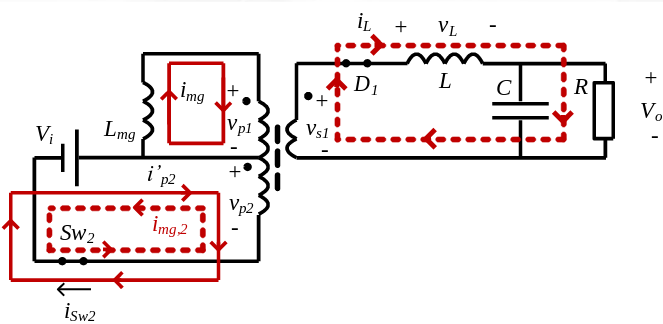
Intervalo 1: \(0<t<D T_s\): S1 ON, S2 OFF
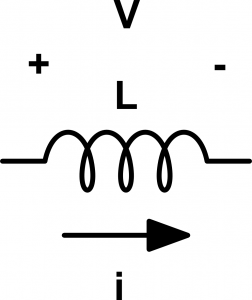
Tensión en el inductor
Haciendo el KCL en la malla 1 del primario, obtenemos:
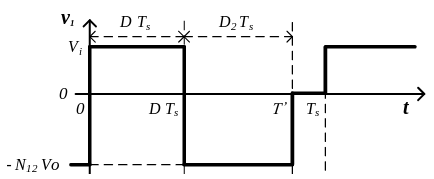
\[ -V_i – v_{p1} = 0 \Rightarrow v_{p1} = – V_i \]
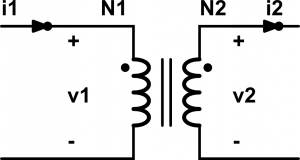
La tensión es negativa respecto a la referencia definida, por tanto la corriente irá en sentido contrario. La corriente «sale del punto», por tanto al otro lado del transformador «entrará por el punto». Esto hará que el diodo D1 no pueda conducir, quedando en circuito abierto mientras que el diodo D2 sí conducirá.
Teniendo en cuenta la relación de transformación:
\[ v_{s_2} = – \frac{N_{s2}}{N_{p1}} V_i \]
donde \(N_p = N_{p1} + N_{p2}\) y \(N_s = N_{s1} + N_{s2}\), en el que normalmente \( N_{p1} =N_{p2} \) y \(N_{s1} = N_{s2} \) .
La tensión en el inductor:
\[ V_L = -v_{s_2} – V_o = \frac{N_{s2}}{N_{p1}} V_i – V_o \]
Corriente en el inductor
\[ V_L = L \frac{di_L}{dt} = \frac{N_{s2}}{N_{p1}} V_i – V_o \]
Si despejamos el diferencial de la corriente e integramos:
\[ i_L = I_{L_{min}} + \frac{1}{L} \left( \frac{V_i}{N_{ps}} – V_o \right) t \]
Corriente de magnetización
\[ i_{sw_1} = i_{mg} + \frac{i_L}{N_{ps}}\]
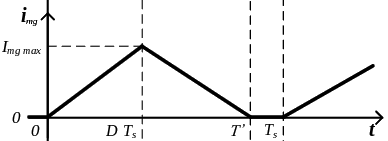
\[ i_{mg} = – I_{mg_{max}} + \frac{V_i}{L}t \]
\[ i_{mg}(0) = – I_{mg_{max}}\]
\[ i_{mg}(DT_s) = I_{mg_{max}} = I_{mg_{max}} + \frac{V_i}{L}DT_s \]
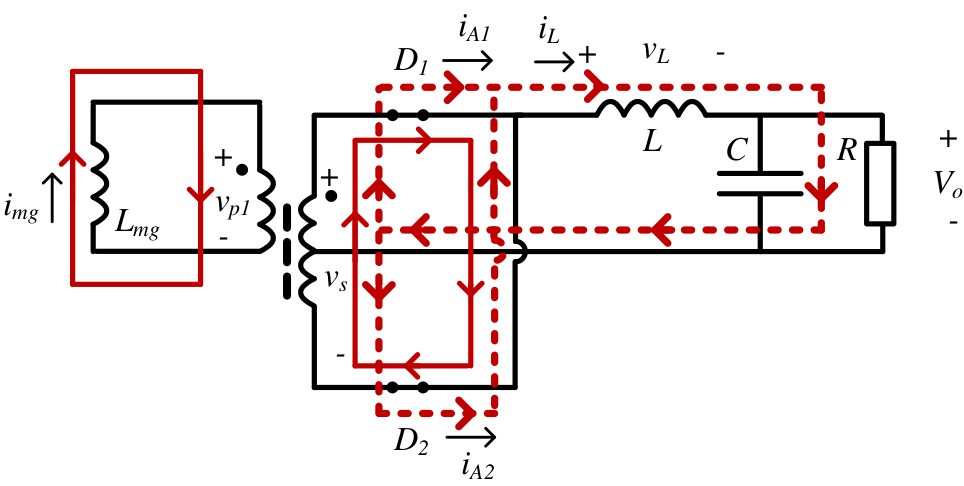
Intervalo 2: \(D T_s<t<\frac{T_s}{2}\): S1 OFF, S2 OFF
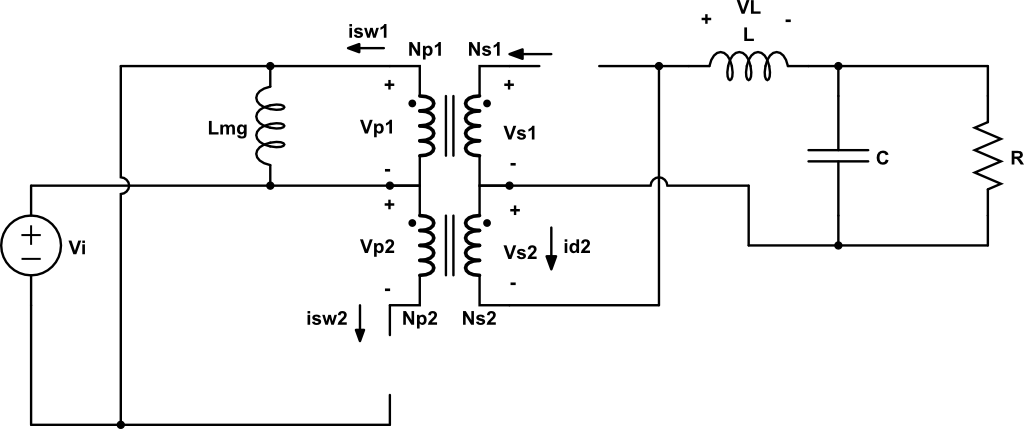
El flujo en el transformador (la corriente magnetizante) y la corrente en la inductancia del filtro de salida son variables de estado y por tanto no admiten discontinuidades. En el primario, puesto que ningún transistor conduce, este devanado está abierto y por lo tanto su corriente es nula (recuérdese que \(L_m\) no es más que un modelo para considerar la magnetización del núcleo, no debe confundirse \(i_m\) con una corriente real que circula por el primario).
En el secundario, la situación es más sutil, pero todo el problema se reduce a determinar qué diodos conduncen (esto es, \(D_1\), \(D_2\) o ambos a la vez) la corriente del inductor de salida.
Supongamos que \(D_1\) continua conduciendo y que \(D_2\) permanece bloqueado, es decir, únicamente conduce la mitad del secundario que está en serie con \(D_1\). Sabemos que la corriente en el inductor de salida y la corriente magnetizante del transformadr no adminten discontinuidades, pero además son variables independientes. Si se reduce la inductancia magnetizante al secundario y \(D_2\) no conduce, el resultado es similar a conectar dos inductancias en serie con condiciones iniciales de corriente distintas, lo que provocaría la sobretensión. Con los dos diodos en conducción, las inductancias magnetizantes y de filtro no están en serie y por lo tanto sus condiciones iniciales pueden ser cualesquiera.
La ecuación de la fuerza magnetomotriz dice:
La fuerza magnetomotriz se puede expresar como el producto del número de vueltas de cualquier devanado por la corriente magnetizante referida al devanado en cuestión y es igual a la suma de las corrientes si son entrantes en los «puntos» del transformador o la resta de las corrientes salientes de los puntos de cada toma, multiplicadas por su numero de vueltas correspondiente.
\[ \sum_{j=1}^{n} N_j i_j = N_1 \cdot i_1 = N_2 \cdot i_2 = … = N_n i_n = \epsilon \]
donde \( \epsilon\) es la fuerza magnetomotriz (que se define como \(F = N \cdot I\) y cuyas unidades son amperios-vuelta o Av).
Es decir, si tenemos un transformador con varias tomas, como es el caso, cada toma aportará un determinado flujo magnético dentro del núcleo del transformador. Según nuestro modelo del transformador utilizamos una inductancia ficticia que simula la corriente de magnetización. Para poder calcular la corriente que pasa en cada una de estas inductancias de magnetización, es necesario aplicar la ecuación de la fuerza magnetomotriz.
La ecuación de la fuerza magnetomotriz en el intervalo anterior es:
\[N_{s2} i_{D2} – N_{p1} i_1 = N_{p1} i_{m} \]
En la que \( N_{p1} i_{m} \) no puede variar brucamente. Al hacer \(i_1 = 0\), debe de aparecer otra corriente (saliendo por el punto) que mantenga el transformador magnetizado, de manera que \(i_m\) no cambie bruscamente.
\[ N_{s2} i_{D2} – N_{s1} i_{D1} = N_{p1} i_m \]
Por tanto, se demuestra que \(D_1\) y \(D_2\) tienen que estar activos.
Para calcular la tensión en el inductor hay que tener varias cosas en consideración. Para que pueda circular corriente en el sentido en que lo hace \(i_{D1}\) e \(i_{D2}\), \(v_{s_1} = -v_{s_2}\) ya que la tensión del nodo común debe ser mayor que el del extremo del transformador. Por tanto:
\[v_{s_1} = -v_{s_2}\]
Debido a que el número de espiras entre el común y los extremos es el mismo, y el flujo magnético que pasa por ambas espiras es el mismo:
\[v_{s_1} = v_{s_2}\]
La única solución para que \(v_{s_1}\) y \(v_{s_2}\) cumplan estas condiciones es que \(v_{s_1} = 0\) y \(v_{s_2} = 0\).
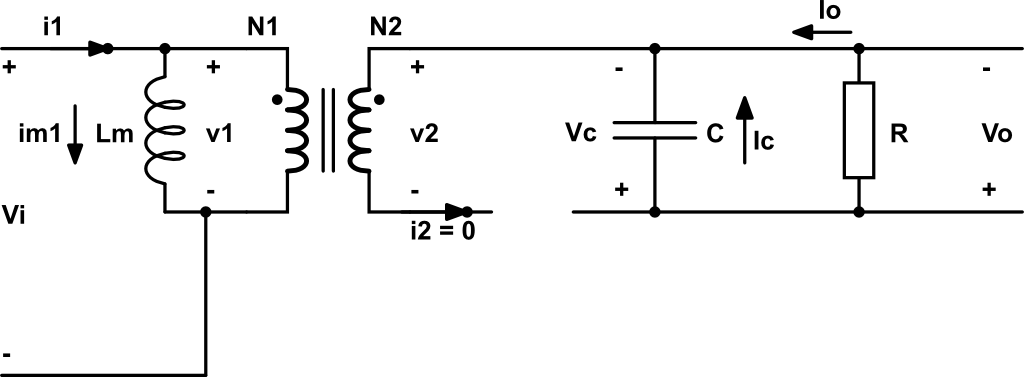
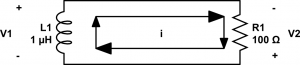
De esta manera, el circuito equivalente en el secundario es:
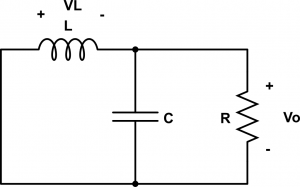
En el que \(V_L = -V_o\).
Corriente en el inductor
\[ V_L = L \frac{di_L}{dt} = -V_o \]
Si despejamos el diferencial de la corriente e integramos:
\[ i_L = I_{L_{max}} – \frac{1}{L} V_o \left( t- DT_s \right) t \]
Corriente de magnetización
\[ v_s = 0 = v_p = v_{p_1} = 0 = L_{mg} \frac{di_{mg}}{dt} \]
\[ i_{A2} = \frac{i_L}{2} – \frac{i_{mg}}{2}N_{12} \]
\[ i_{A1} =\frac{i_L}{2} – \frac{i_{mg}}{2}N_{12} \]
\[ i_{mg_{1s}} = \frac{N_{p1}}{N_s} I_{mg_{max}} = \frac{N_{ps}}{2} I_{mg_{max}} \]
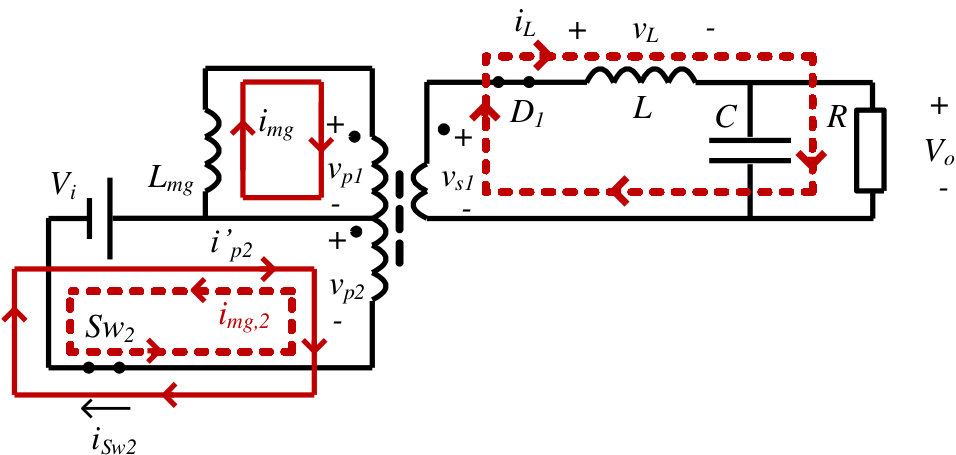
Intervalo 3: \(\frac{T_s}{2}<t<\frac{T_s}{2} + D T_s\): S1 OFF, S2 ON
En este caso,
\[ v_{p2} = V_i\]
Ya que esta tensión es positiva, la corriente entrará por el punto en el primario y saldrá por el punto en el secundario. De manera que el diodo D1 estará en activa y diodo D2 estará en corte.
Del factor de transformación:
\[ v_{s_1} = \frac{N_{s_1}}{N_{p_2}} V_{p_2} = \frac{N_{s_1}}{N_{p_2}} V_{i} \]
Por lo que la tensión en el inductor es directamente:
\[ V_L = \frac{N_{s_1}}{N_{p_2}} V_{i} – V_o \]
Corriente en el inductor
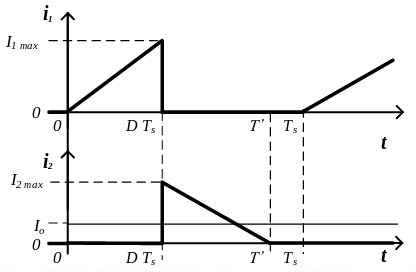
La forma de onda de la corriente es exactamente igual que en el intervalo 1.
Corriente de magnetización
\[ i_{mg} = I_{mg_{max}} – \frac{V_i}{L_{mg}} \left(t – \frac{T_s}{2} \right) \]
\[ i_{sw_2} = \frac{1}{N_{ps}} i_L – i_{mg} \]
Intervalo 4: \(\frac{T_s}{2} + D T_s<t< T_s\): S1 OFF, S2 OFF
El intervalo 4 es exactamente igual al intervalo 2 ya que ambos transistores están de nuevo en OFF. Por tanto,
\[ V_L = -V_o \]
Corriente en el inductor
La forma de onda de la corriente es exactamente igual que en el intervalo 2.
Corriente de magnetización
\[ i_{mg} = – I_{mg_{max}} \]
\[ i_{mg_s} = \frac{N_{p1}}{N_s} \left( – I_{mg_{max}} \right) \]
\[ i_{A1} = \frac{I_L}{2} – \frac{N_{ps}}{2} I_{mg_{max}} \]
\[ i_{A2} = \frac{I_L}{2} + \frac{N_{ps}}{2} I_{mg_{max}} \]
Función de transferencia
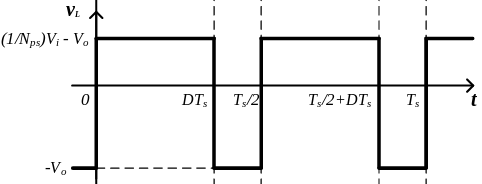
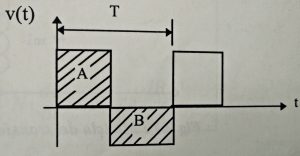
La media de la tensión en un inductor debe ser 0, ya que de lo contrario la corriente del inductor aumentaría indefinidamente. Forzando esta condición obtenemos la función de transferencia del convertidor:
\[ \left< V_L \right> = 0 = \frac{1}{\frac{T_s}{2}} \left[ \left( \frac{V_i}{N_{ps}} – V_o \right)DT_s – V_o \left( \frac{T_s}{2} – D T_s \right) \right] \]
\[ 0 = D \frac{V_i}{N_{ps}} – V_o D- \frac{V_o}{2} – D V_o \]
\[ V_o = \frac{2}{N_{ps}}DV_i \]
Donde \( 0 < D < 0.5 \) ya que no pueden estar ambos transistores en conducción simultaneamente.
Corriente máxima y mínima en el inductor
De los intervalos 1 y 2 se han derivado las expresiones de la corriente en el inductor. Sin embargo, estas estaban en función de la corriente máxima y mínima que circula al final y principio de cada intervalo.
Para obtener la definición de corriente máxima y mínima tenemos que resolver un sistema de ecuaciones. Una de las ecuaciones nos la da la corriente media en el inductor y la otra, el rizado de la corriente en el inductor.
Corriente media en el inductor
Del circuito, aplicando el KCL podemos obtener que:
\[ i_L = i_c + I_o \]
Si calculamos el nivel medio de esta expresión:
\[ \left< i_L \right> = \left< i_c + I_o \right> = \left< i_c \right> + \left< I_o \right> = \left< I_o \right> = I_o\]
\( \left< i_c \right> = 0\) porque el nivel medio de la corriente en un condensador debe ser nulo por definición.
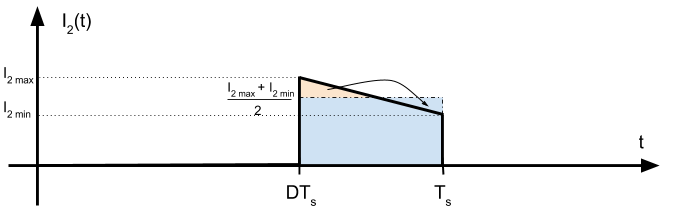
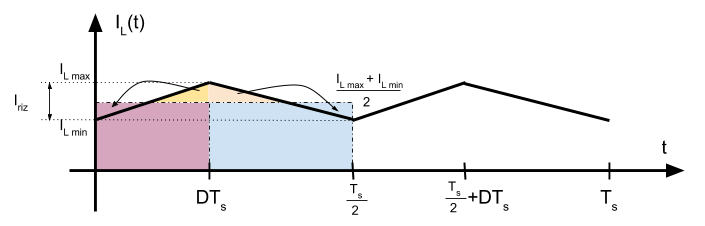
De la figura de la corriene en \( i_L \) podemos definir de manera alternativa el nivel medio de la corriente como:
\[ \left< i_L \right> = \frac{1}{\frac{T_s}{2}} \cdot \frac{T_s}{2} \frac{I_{L_{max}} + I_{L_{min}}}{2} = \frac{I_{L_{max}} + I_{L_{min}}}{2}\]
Por tanto, uniendo ambas expresiones obtenemos la primera de las ecuaciones del sistema:
\[I_o = \frac{I_{L_{max}} + I_{L_{min}}}{2}\]
Para la otra, definimos la corriente máxima (o mínima indistintamente) en función de la mínima (o máxima respectivamente). Para ello, decimos que \(I_{L_{max}} \) es \( I_{L_{min}}\) más el incremento de la corriente en ese intervalo, cosa que podemos hacer ya que conocemos la pendiente de la corriente (ver apartados anteriores).
\[ I_{L_{max}} = I_{L_{min}} + \frac{1}{L} \left( \frac{V_i}{N_{ps}} – V_o \right) D T_s \]
O del mismo modo:
\[ I_{L_{min}} = I_{L_{max}} – \frac{1}{L} V_o \left( \frac{T_s}{2} – D T_s \right) \]
Despejando \( I_{L_{max}} – I_{L_{min}} \)
\[ I_{L_{max}} – I_{L_{min}} = \frac{1}{L} \left( \frac{V_i}{N_{ps}} – V_o \right) D T_s \]
Por tanto:
\[\left.\begin{matrix}
I_{L_{max}} + I_{L_{min}} = 2I_o \\
I_{L_{max}} – I_{L_{min}} = \frac{1}{L} \left( \frac{V_i}{N_{ps}} – V_o \right) D T_s
\end{matrix}\right\}\]
Resolviendo el sistema obtenemos que:
\[ I_{L_{max}} = I_o + \frac{1}{2L} \left( \frac{V_i}{N_{ps}} – V_o \right) D T_s \]
\[ I_{L_{min}} = I_o – \frac{1}{2L} \left( \frac{V_i}{N_{ps}} – V_o \right) D T_s \]
De \( I_{L_{min}} \) podemos calcular el límite de la conducción continua:
\[ I_{L_{min}} = I_o – \frac{1}{2L} \left( \frac{V_i}{N_{ps}} – V_o \right) D T_s = 0\]
Límite de la conducción continua:
\[ I_o = \frac{1}{2L} \left( \frac{V_i}{N_{ps}} – V_o \right) D T_s \]
Corriente de magnetización en todo el periodo
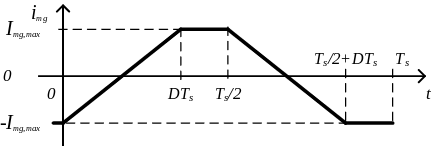
Como este convertidor magnetiza el núcleo de manera simétrica, podemos afirmar que \(I_{{mg}_{min}} = – I_{{mg}_{max}}\).
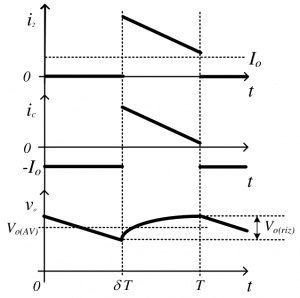
Para determinar el valor de \(I_{{mg}_{max}}\), hemos demostrado que en el primer periodo la tensión del primario es \(-V_i\). Por tanto, la inductancia de magnetización tiene aplicada una tensión de \(-V_i\), lo que fuerza a que haya una variación de corriente, tal y como vemos en la figura de arriba. En esta figura se ha tomado la dirección de la corriente de magnetización en sentido que va desde la toma central del transformador hasta la el otro extremo del transformador. Es por eso que tal y como vemos en la figura, al aplicar una tensión negativa la corriente aumenta.
La expresión de la corriente en este periodo será:
\[ i_{mg} = I_{{mg}_{min}}+ \frac{V_i}{L}t\]
En el instante \(t = DT_s\), el valor de la corriente es el máximo:
\[ I_{{mg}_{max}}= I_{{mg}_{min}} + + \frac{V_i}{L}DT_s\]
Como sabemos que \(I_{{mg}_{min}}= – I_{{mg}_{max}}\):
\[ I_{{mg}_{max}} = -I_{{mg}_{max}} + \frac{V_i}{L}DT_s\]
\[ 2I_{{mg}_{max}} = \frac{V_i}{L}DT_s\]
\[ I_{{mg}_{max}} = \frac{V_i}{2L}DT_s\]
Si tenemos el valor del factor de inductancia \(A_L\) del núcleo, el número de vueltas del primario, la frecuencia de conmutación, el ciclo de trabajo y la tensión de entrada podemos calcular el valor máximo de la corriente de magnetización teniendo en cuenta que \( L_1 = \frac{N^2_1}{\mathfrak{R}} = N^2_1 A_L\). Por tanto:
\[ I_{{mg}_{max}} = \frac{V_i}{2 N^2_1 A_L}DT_s\]
Rizado de tensión de salida
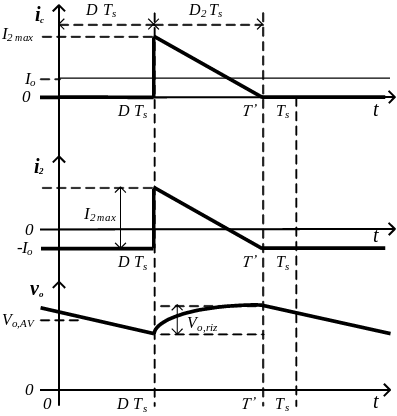
Para calcular el rizado de tensión en la salida vamos a considerar la aproximación de que el rizado de corriente se va por el condensador y que el valor medio de la corriente se va por la carga:
\[ i_L \approx i_c + I_o\]
\[ i_c = i_L – I_o\]
La corriente en un condensador es \(i_c = C \frac{dv_c}{dt} \).
Por tanto, si integramos esta expresión obtenemos la tensión en bornes del condensador.
\[ v_c = \frac{1}{C} \int{i_c dt} \]
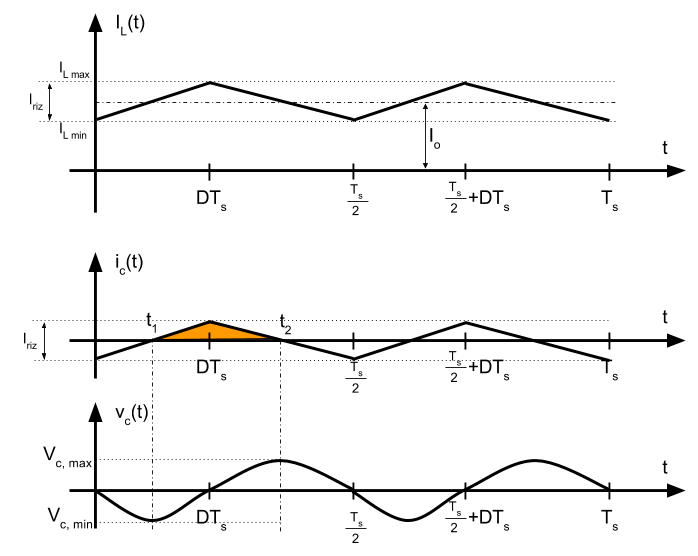
\[\left.v_c\right|^{v_{c,max}}_{v_{c,min}} = \frac{1}{C} \int_{t_1}^{t_2} i_c dt\]
El resultado de esta integral es igual al área marcada en naranja. Como es un triángulo, el área es \(\frac{1}{2} \text{base · altura} \) donde la base es la diferencia entre \(t_1\) y \(t_2\). Si vemos en el dibujo, es \(\frac{T_s}{4}\). Por tanto:
\[ \left.v_c\right|^{v_{c,max}}_{v_{c,min}} = \frac{1}{C} \frac{1}{2} \frac{T_s}{4} \frac{I_{riz}}{2} = \frac{1}{C} \frac{I_{riz}}{16 f_s} \]